Virtual test driving also supports the development of perception modules: From the generation of synthetic training data to the development support and validation of perception, sensor data fusion and localization – both with SIL and HIL status. The creation and reproduction of corner cases, which occur very rarely in reality, make it easy to track the stages of progress.
Your benefits at a glance
Realistic sensor simulation
Physically valid, parametric models for all commonly used types of sensors (cameras, radar, lidar, ultrasonic, GNSS)
Extensive 3D library
Includes a material database – no knowledge of 3D modelling necessary
Realistic environment model
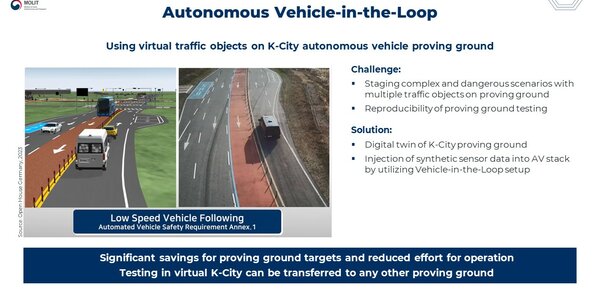
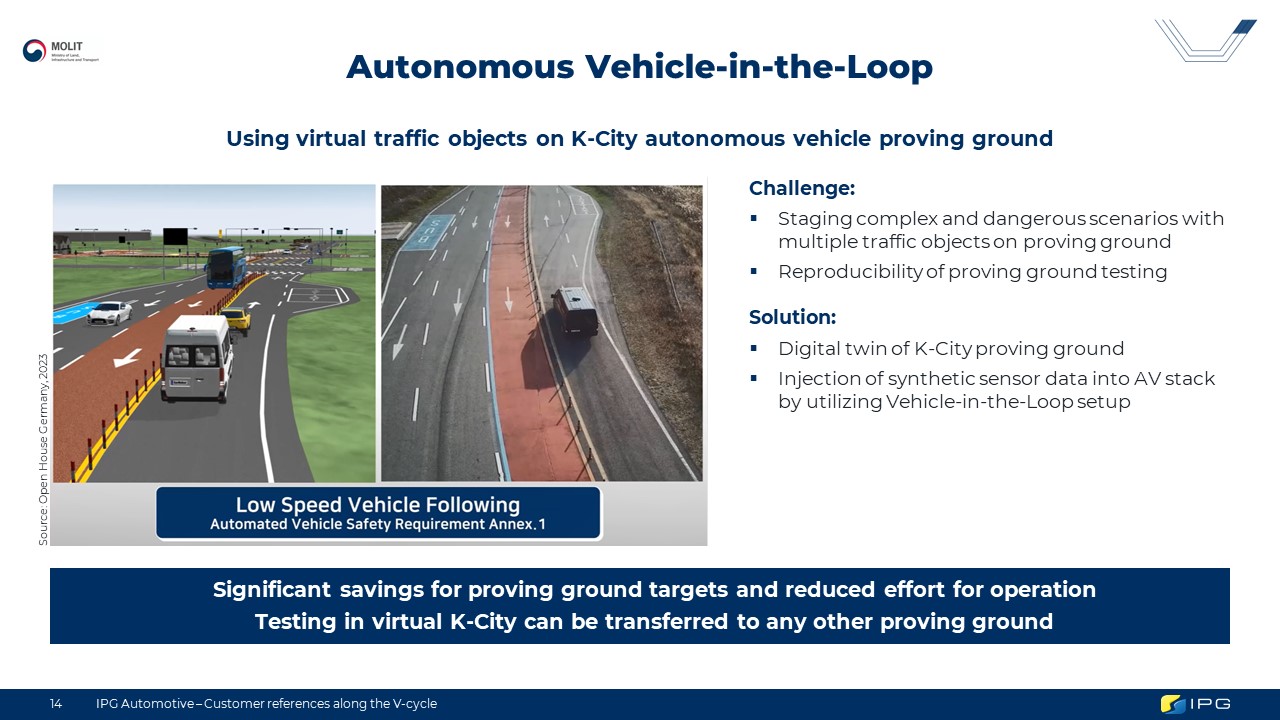
Development of digital twins of real-world roads
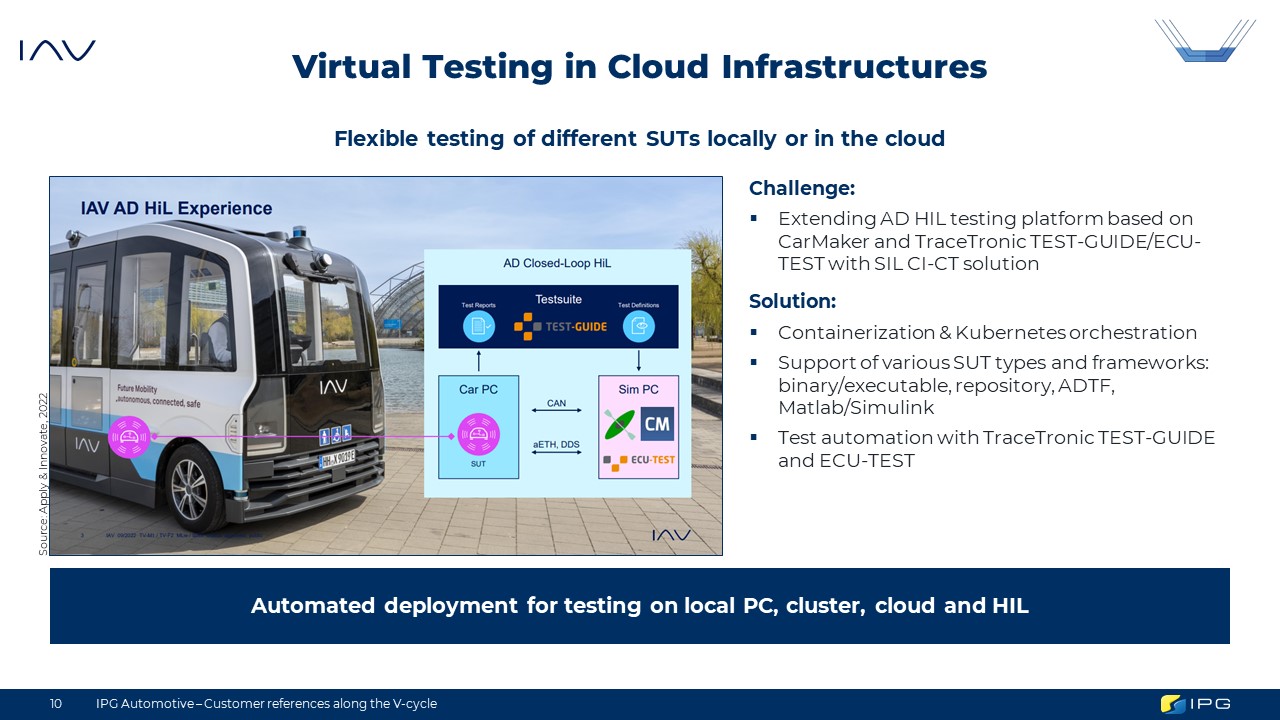
Closed-loop in all stages of development
Testing perception software (MIL/SIL) and hardware (HIL) using raw data input or target simulators
Flexible und optimized scenario generation
Manual and automatic setup using various data sources
Error-free ground truth
Automatic generation of the ground truth for automated performance evaluation and synthetic training data for machine learning algorithms