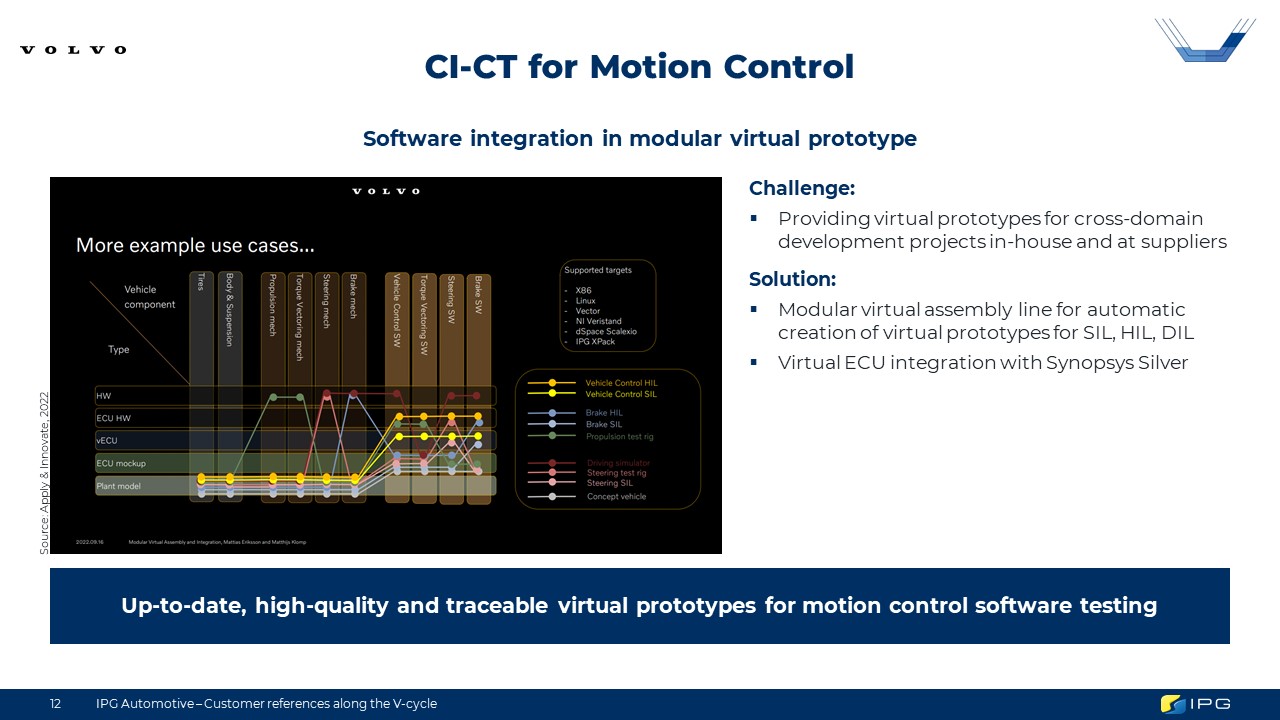
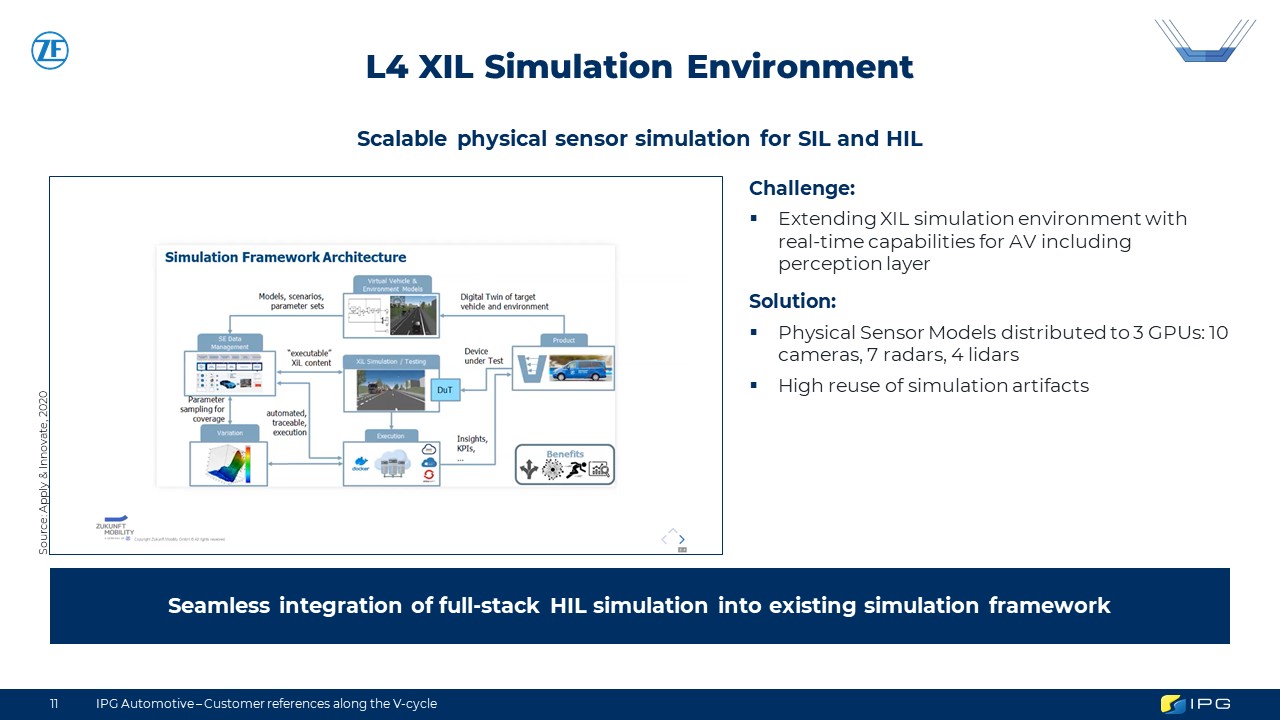
虚拟车辆测试还支持SIL和HIL状态下感知模块的开发:从综合训练数据的生成到感知、传感器数据融合和定位的开发支持和验证。现实世界中,极端案例的创建和复制很少发生,使用虚拟车辆测试可以轻松跟踪进度。
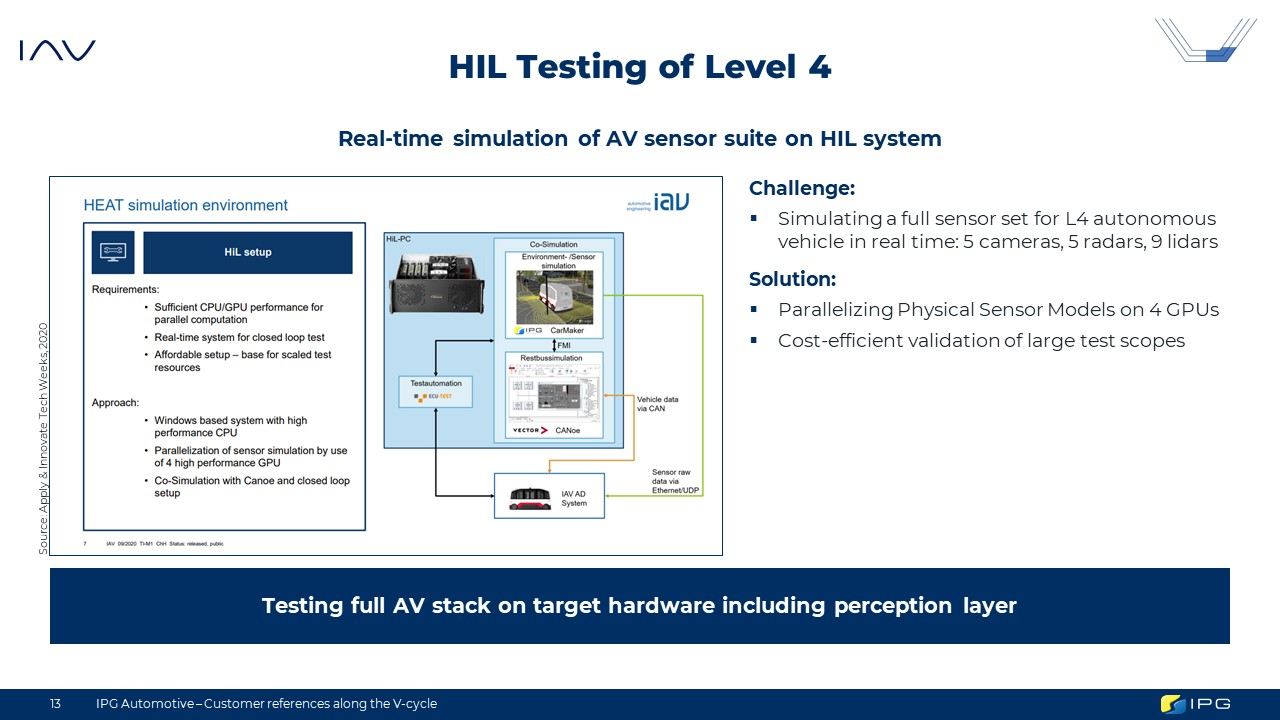
真实的传感器仿真
适用于所有常用类型传感器(相机、雷达、激光雷达、超声波、GNSS)的物理有效参数模型
丰富的 3D数据库
包括一个材料数据库(无需具备3D 建模知识)
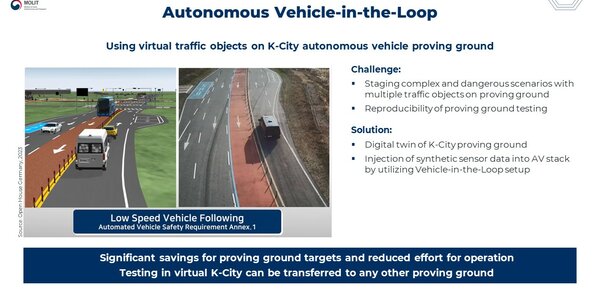
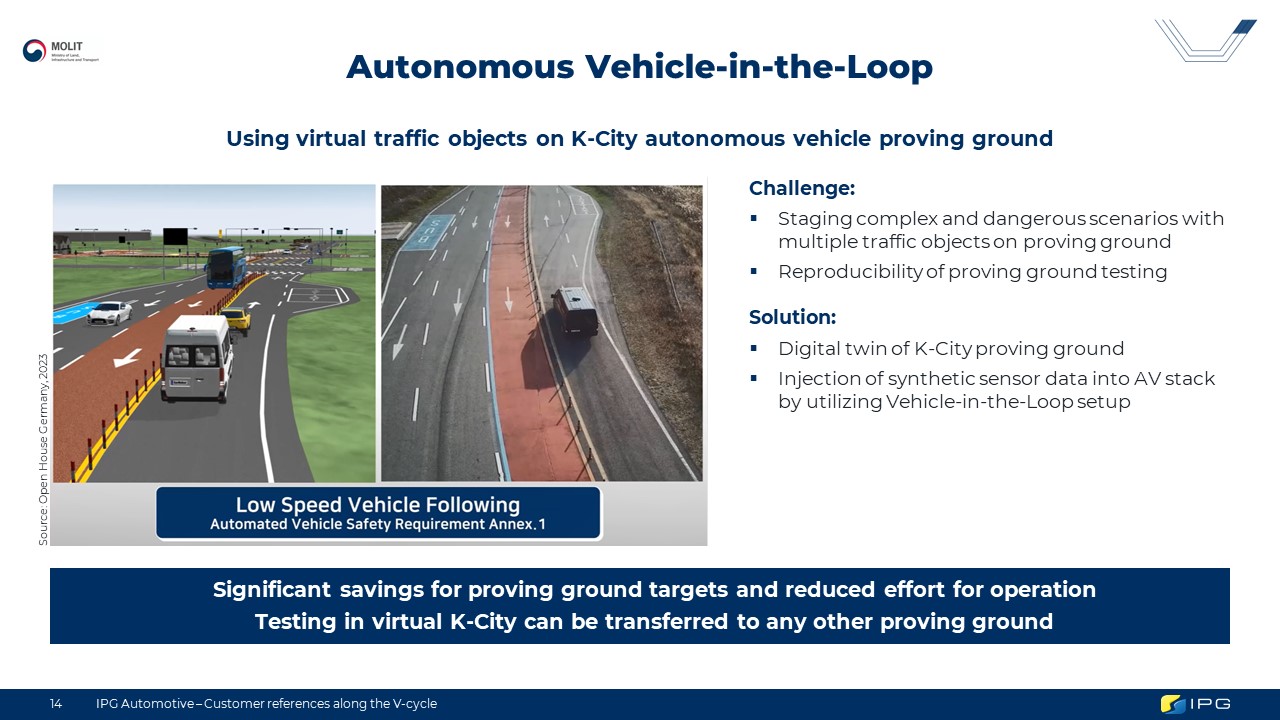
现实环境模型
现实世界道路数字孪生的开发
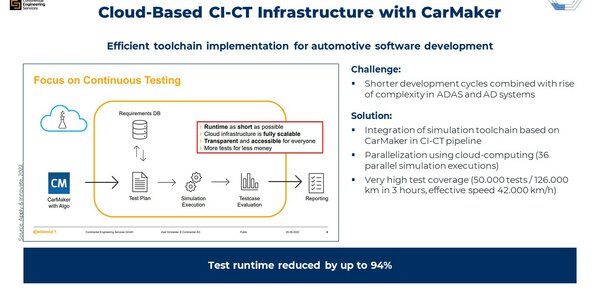
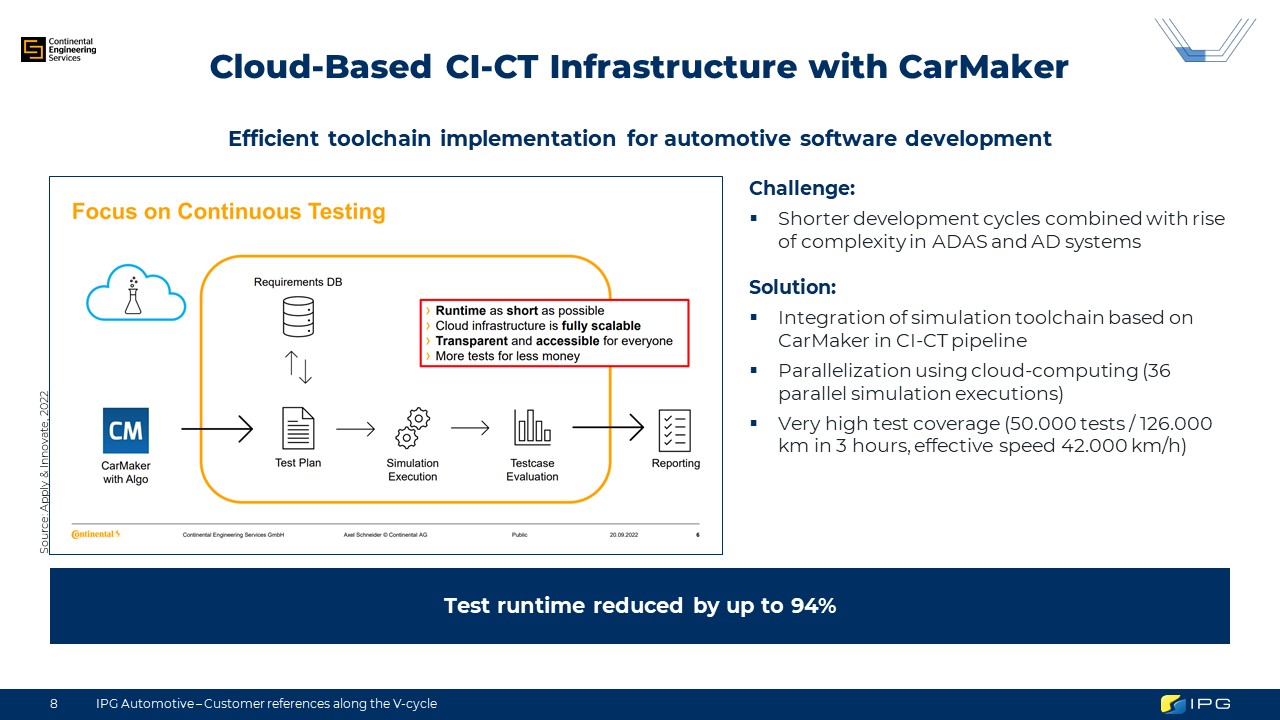
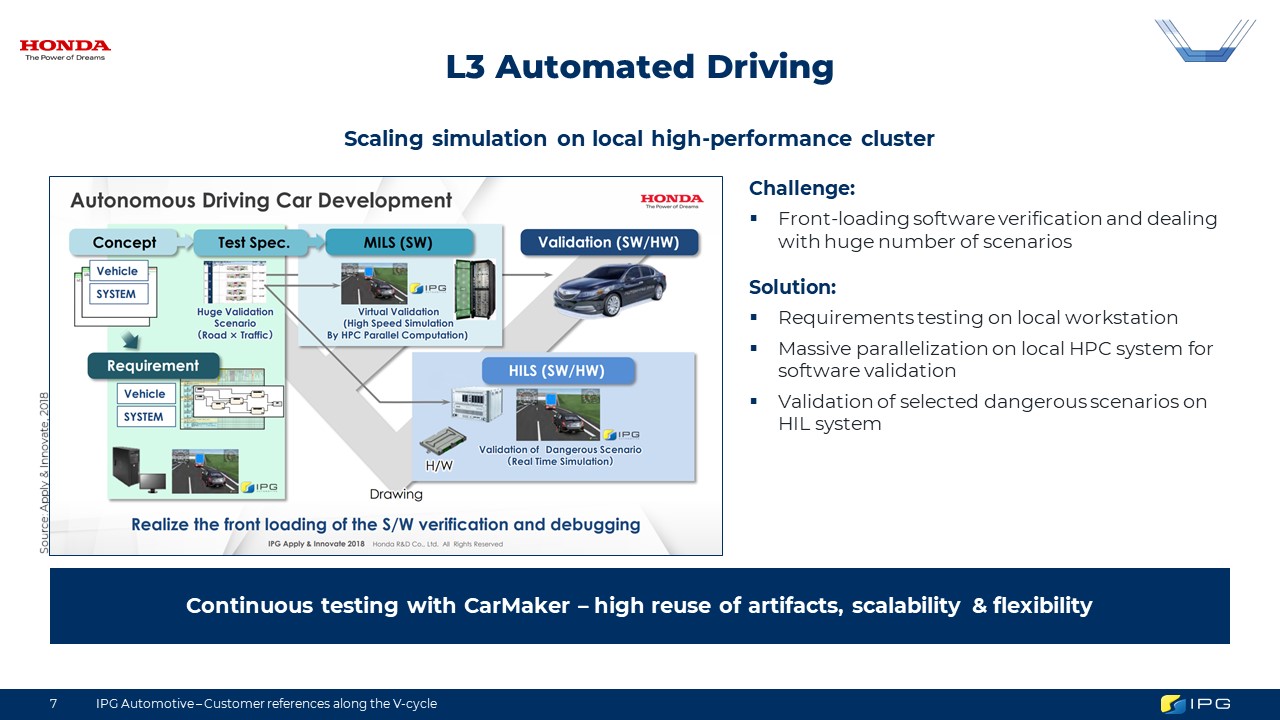
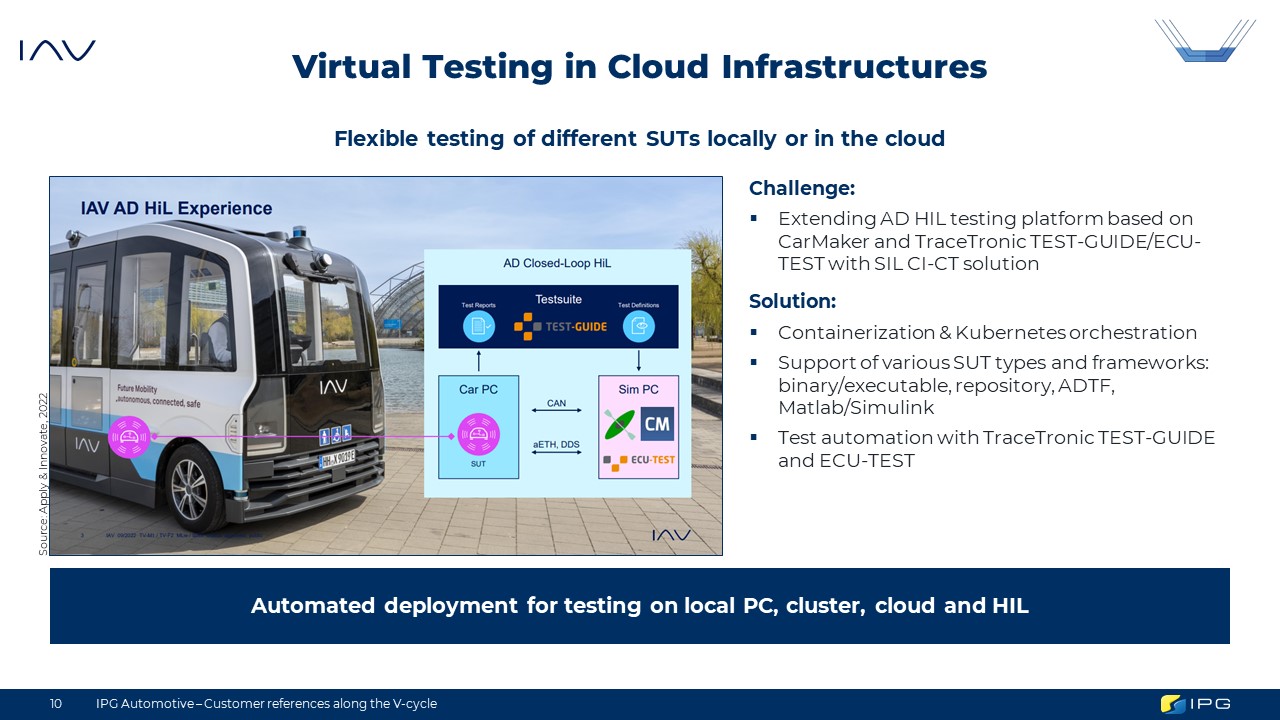
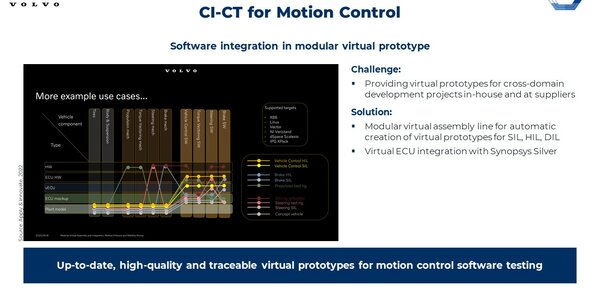
各个开发阶段的闭环
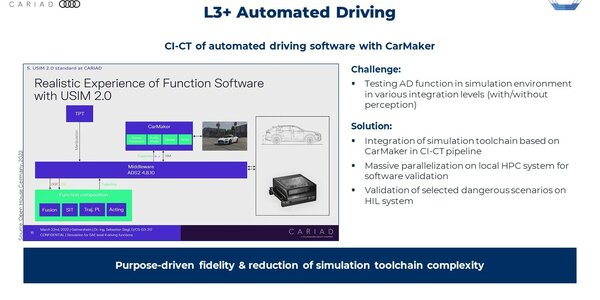
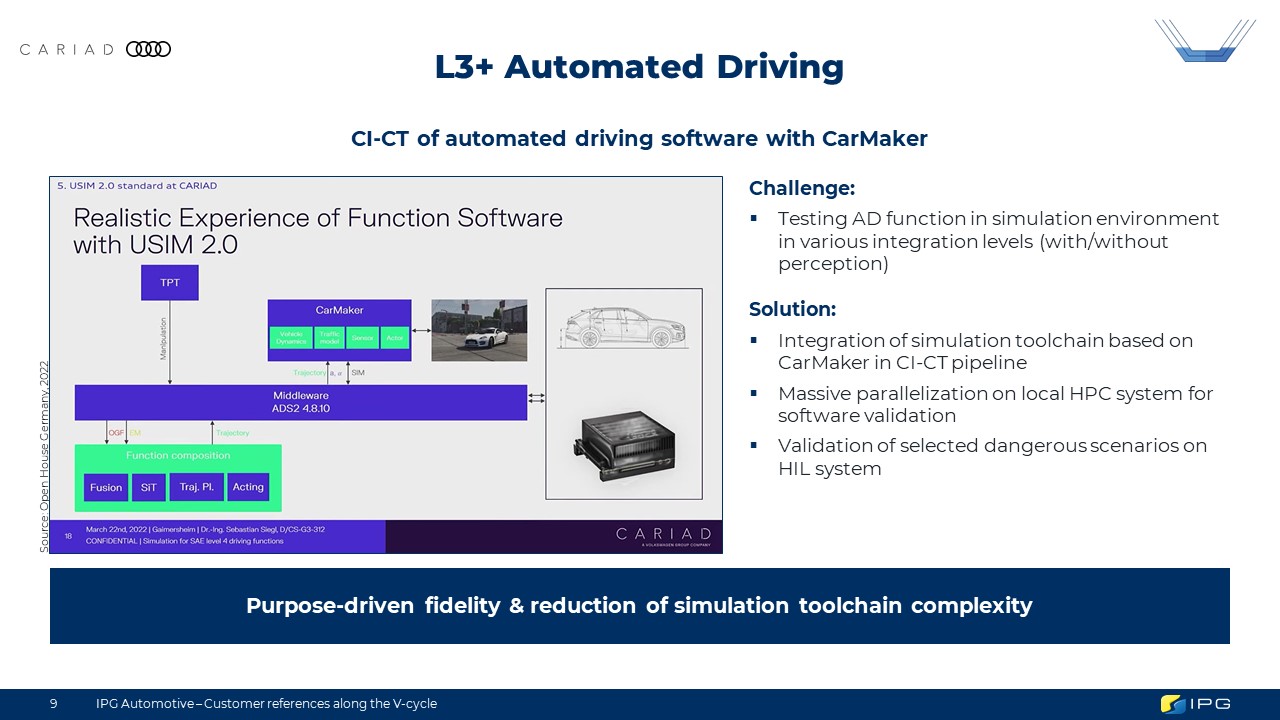
使用原始数据输入或目标模拟器测试感知软件 (MIL/SIL) 和硬件 (HIL)
灵活且优化的场景生成
使用各种数据源进行手动和自动设置
无误差的路面实况
自动生成用于机器学习算法的自动性能评估和综合训练数据的路面实况
我们诚邀您咨询我们的专家团队
浏览我们的媒体库以获取更多专业知识,包括论文、手册、成功案例和视频。