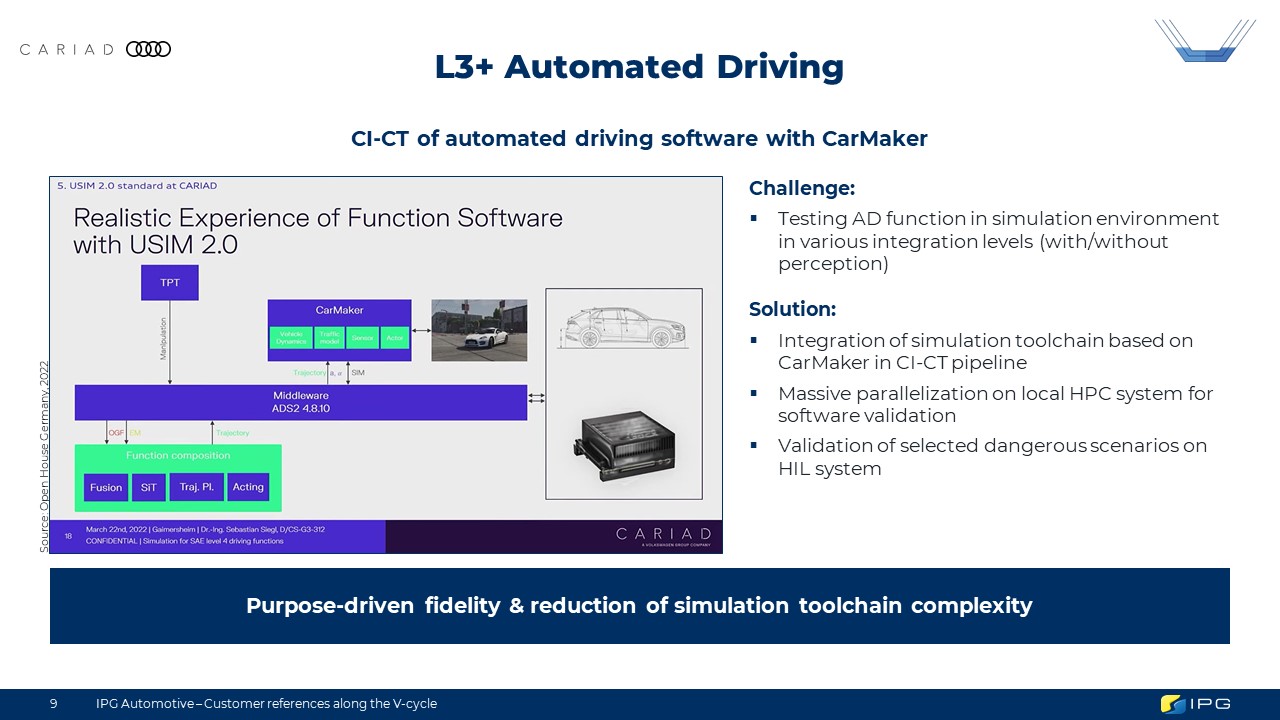
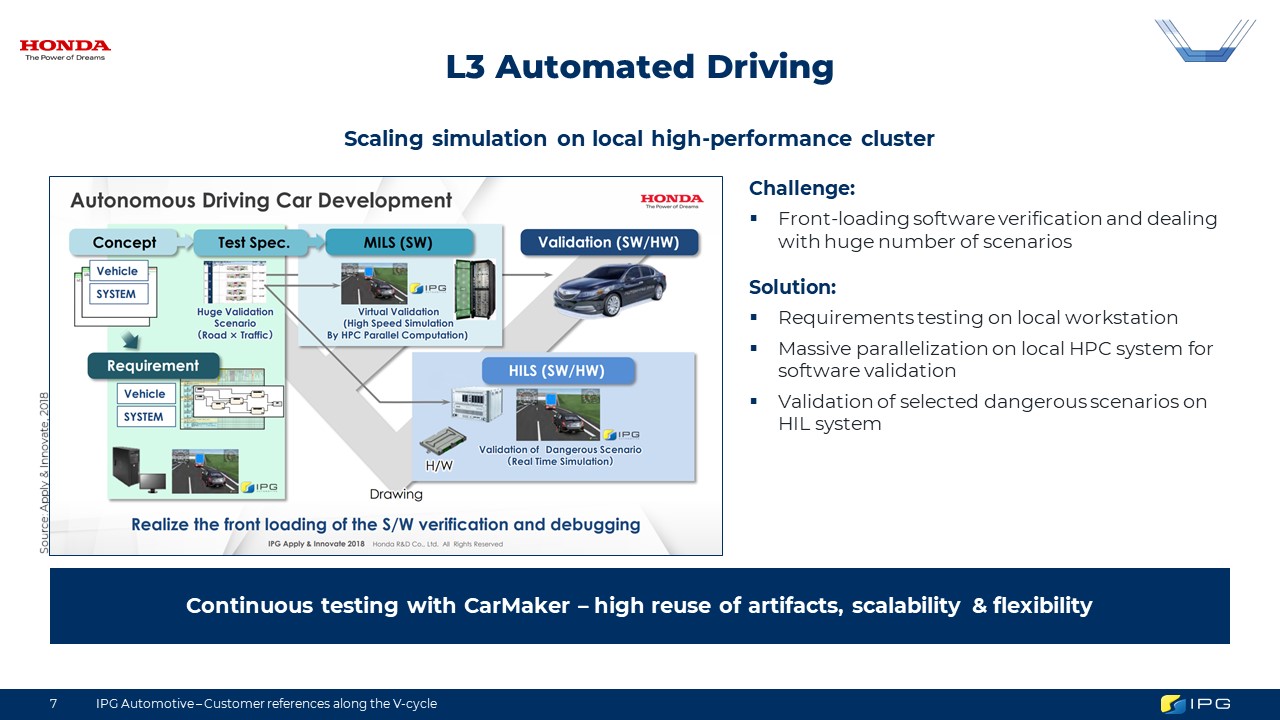
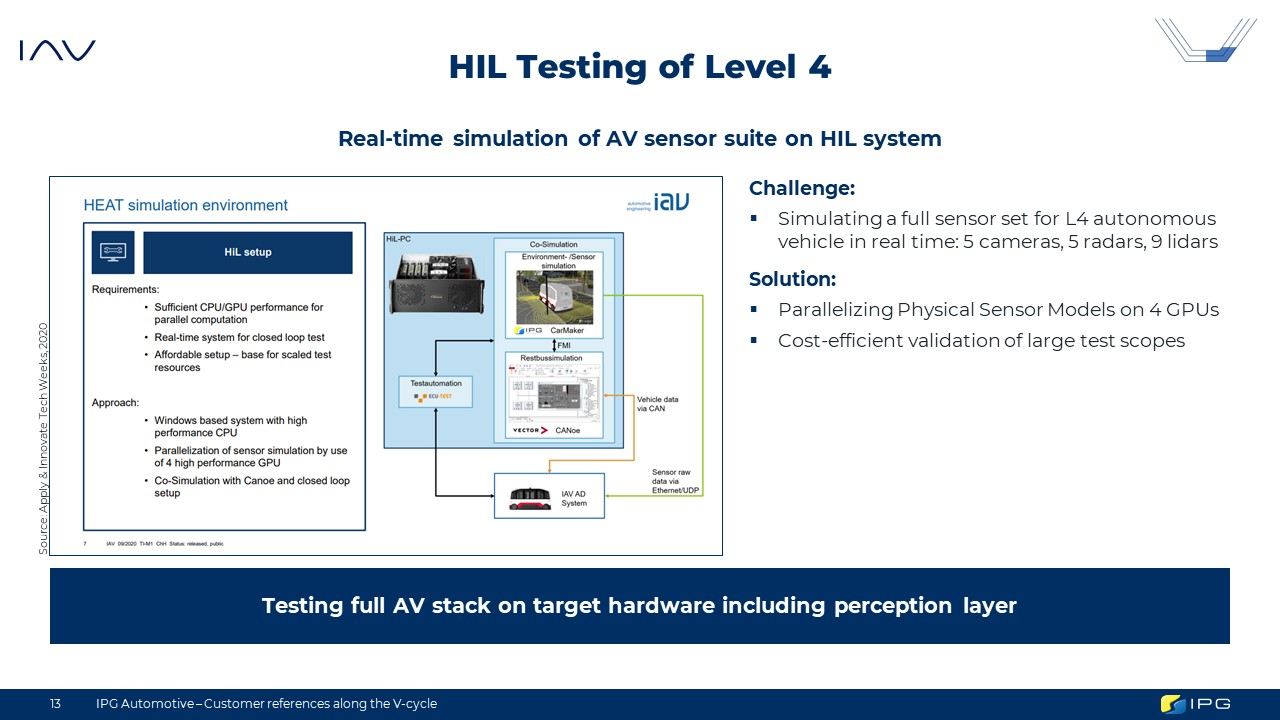
After testing the individual modules (perception and localization, decision-making and motion planning, motion control), it is also possible to validate the complete system using simulation: either only with software tests or also with hardware components such as real-life sensors and processors. To gather the necessary information, it is essential to have high-speed, realistic sensor models and vehicle dynamics models along with complex simulation scenarios to master.
Your benefits at a glance
Complete simulation environment from a single source
Vehicle, sensor models and environment simulation
Physical validity
Tried-and-true vehicle dynamics and sensor models with various levels of complexity
Flexible and optimized scenario generation
Manual and automatic setup using various data sources, compatibility with ASAM OpenDRIVE & OpenSCENARIO
Determinism and reproducibility
Precise reproducibility of simulation scenarios
Flexibility in applications
Platform independence: Windows, Linux, Ubuntu
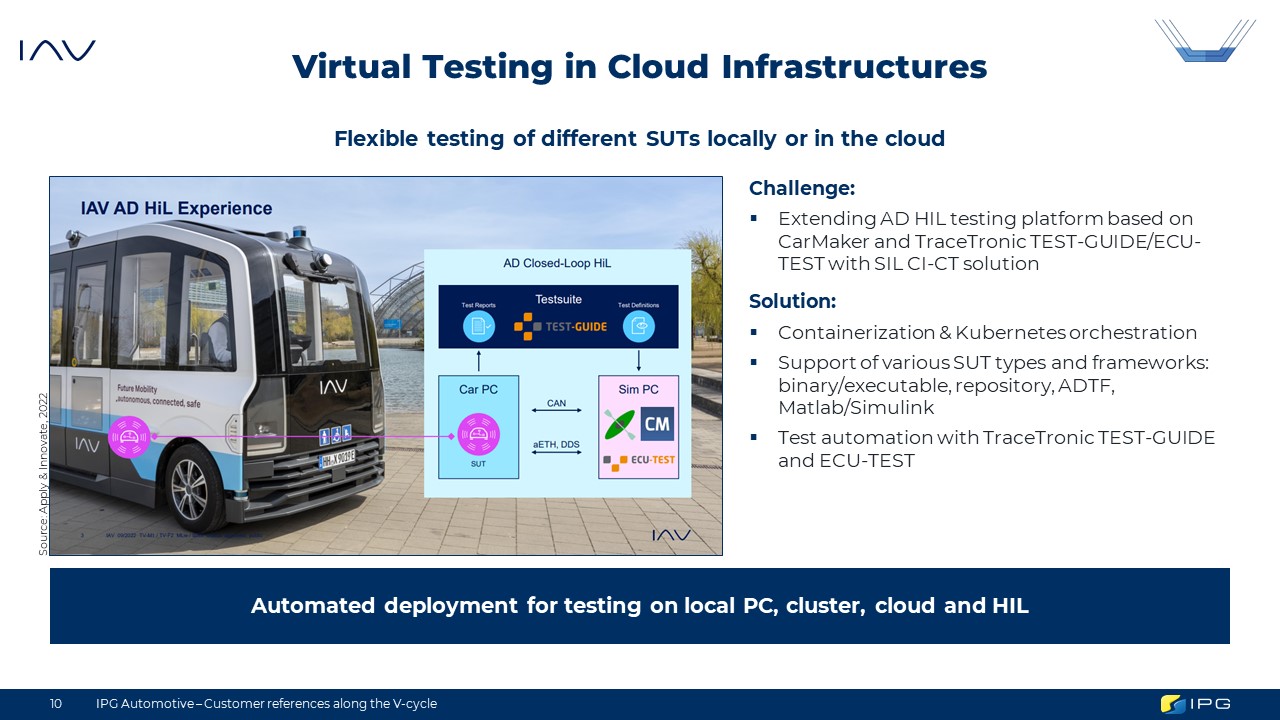
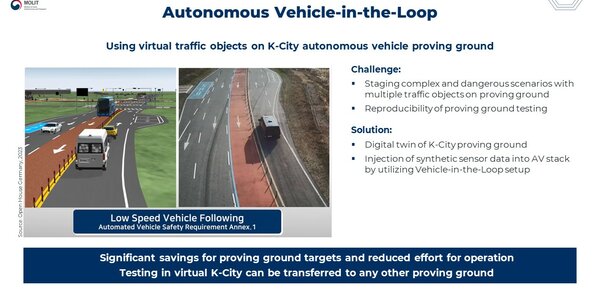
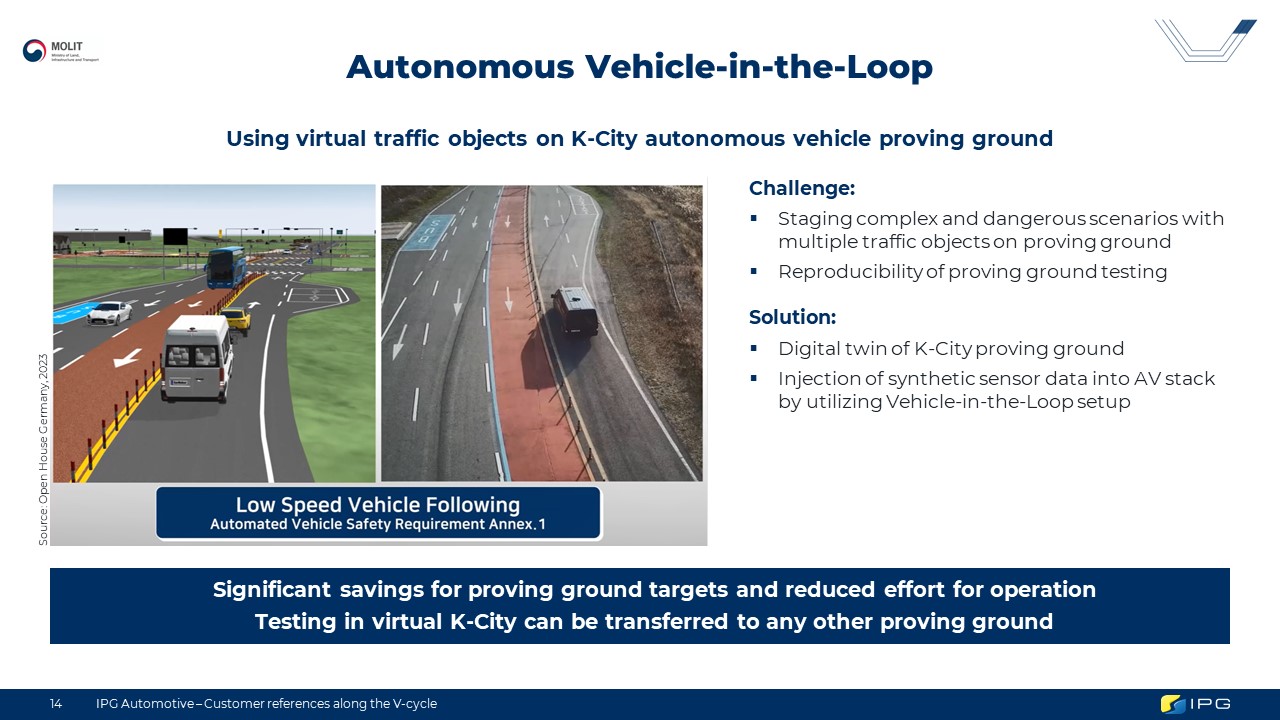
Hardware validation using HIL and VIL
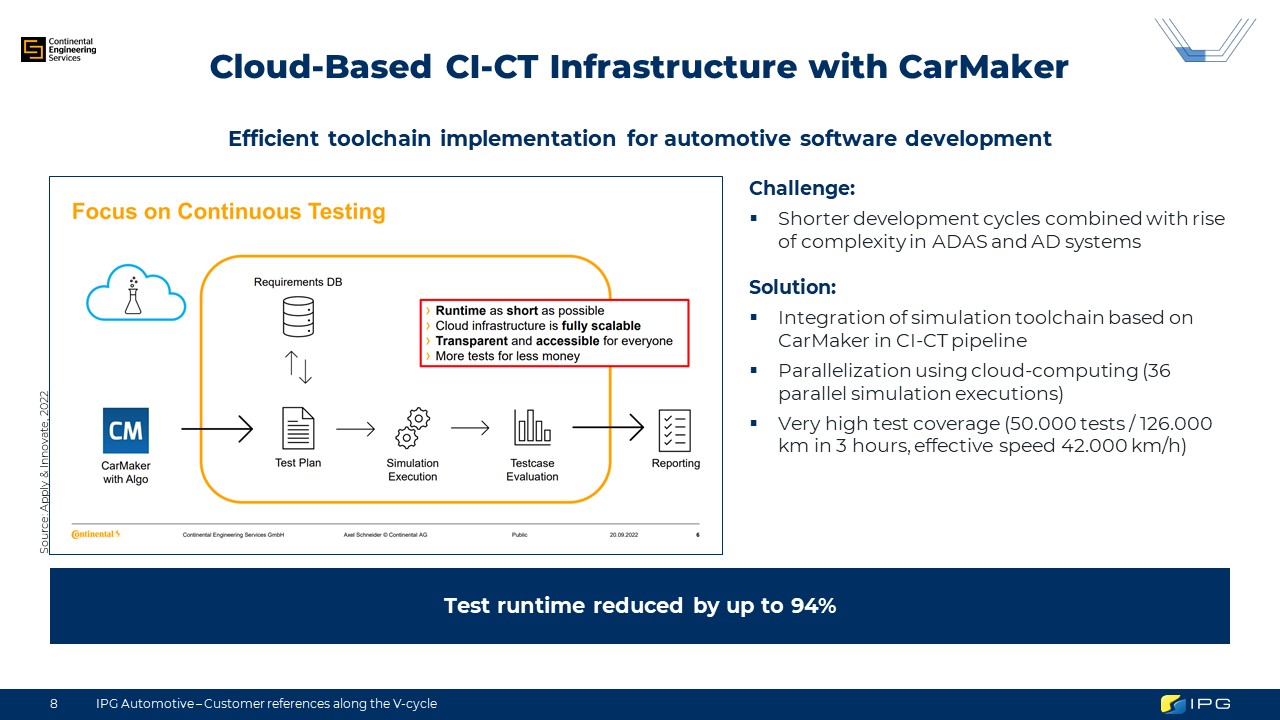
Efficiency and scalability
Best-in-class performance, real-time capability as well as parallelization on local clusters and clouds