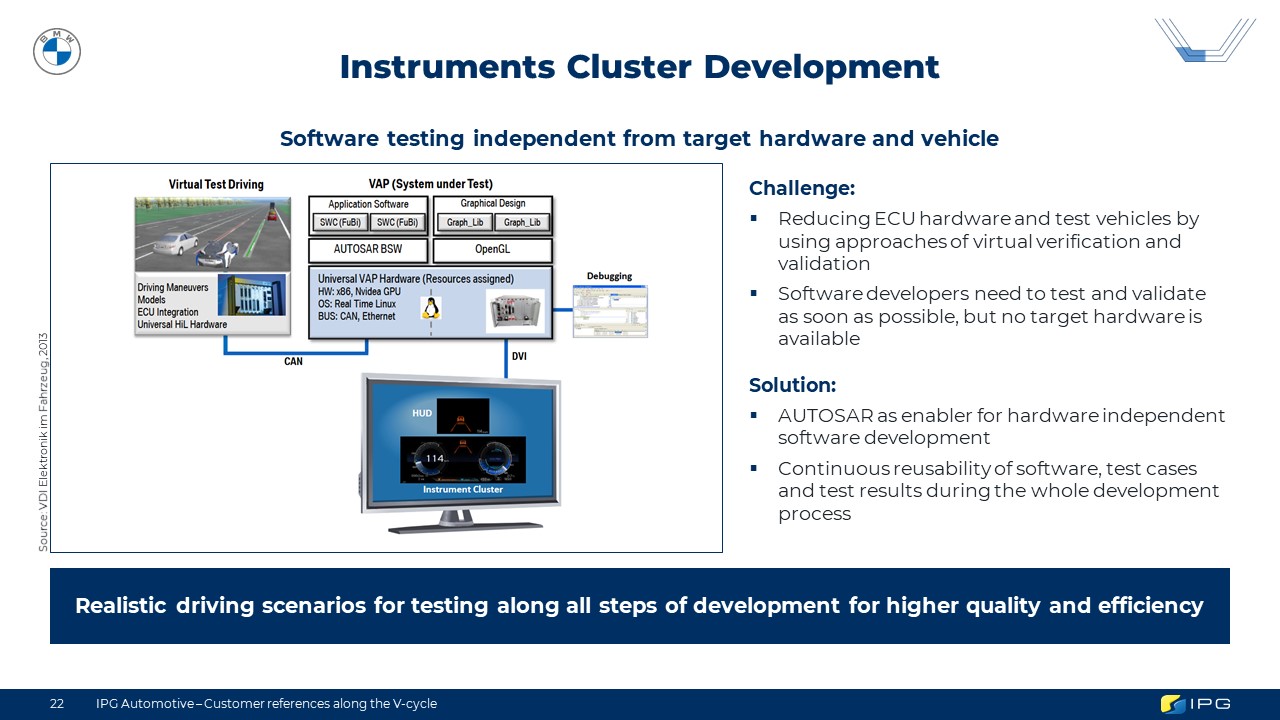
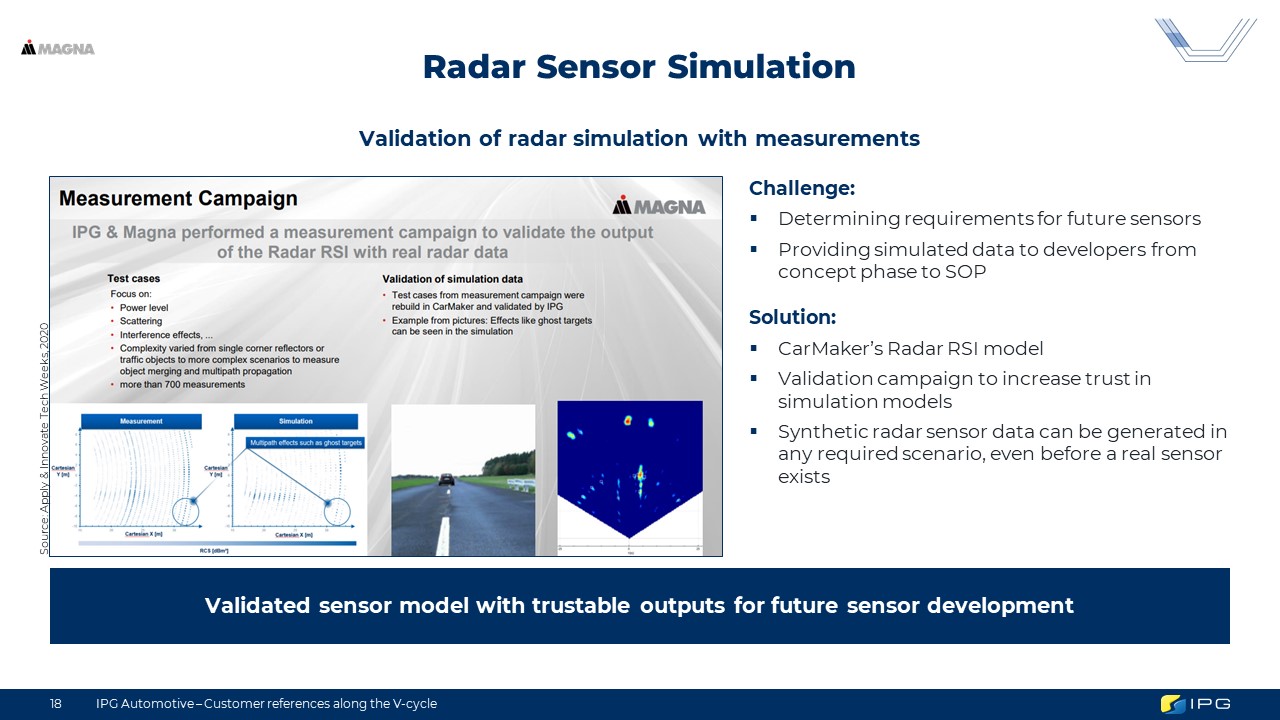
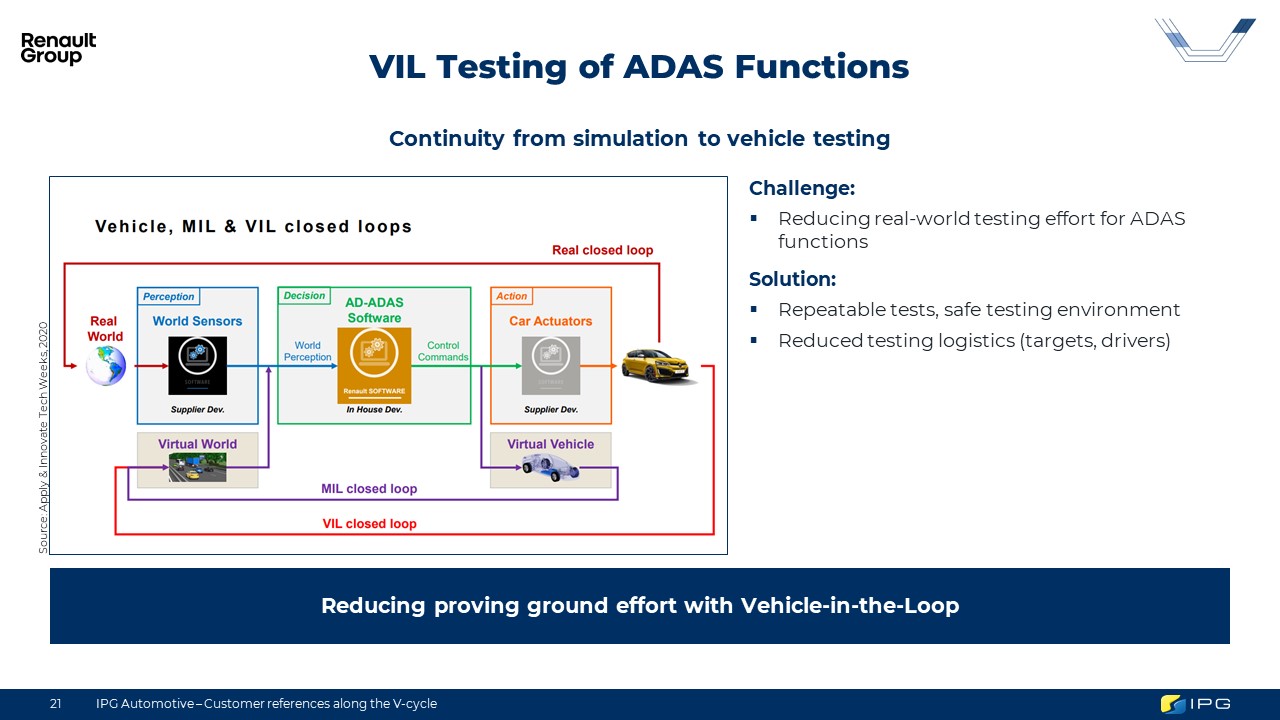
Virtual test driving allows to estimate how advanced driver assistance systems will react in specific test scenarios, and which evaluation criteria will be met by the functions early in the development process.
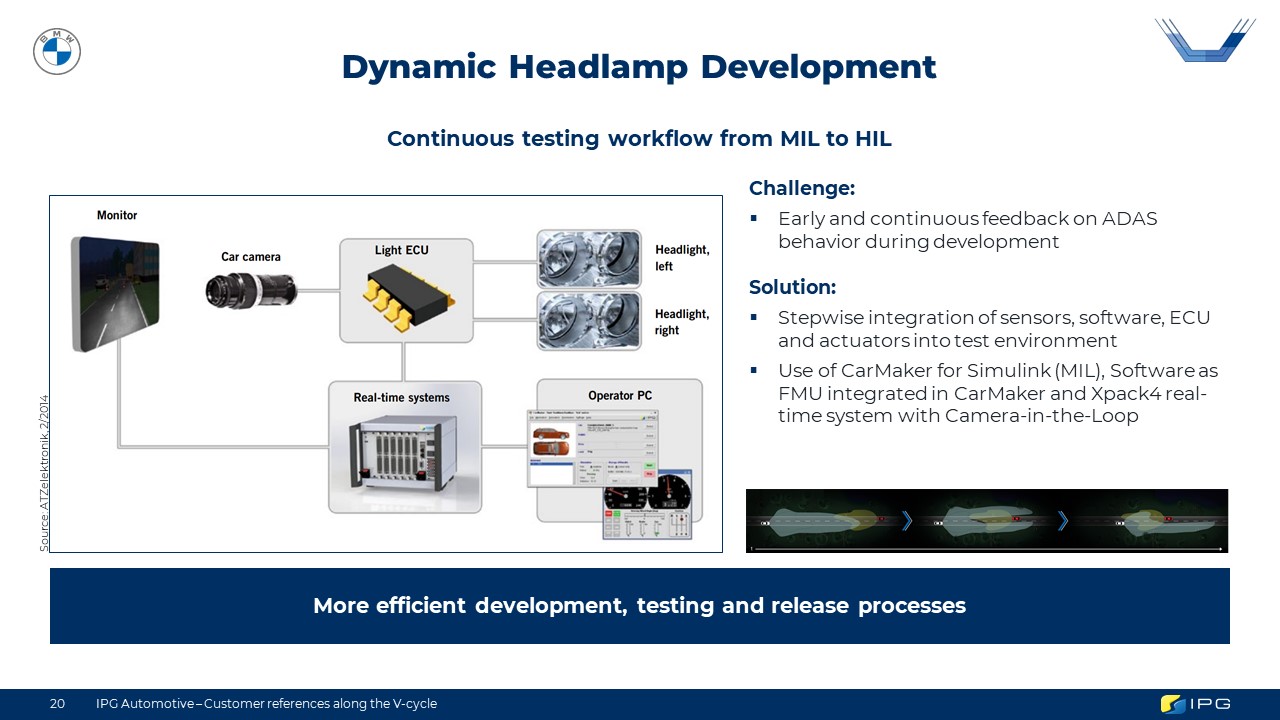
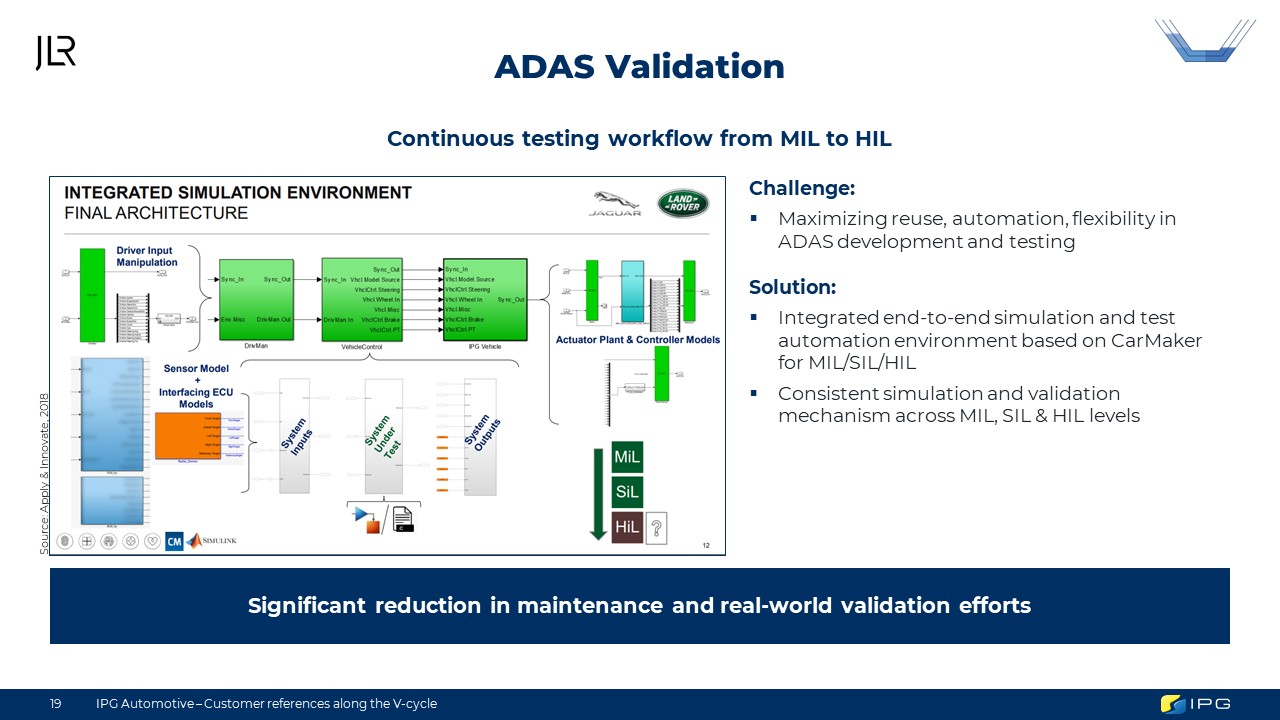
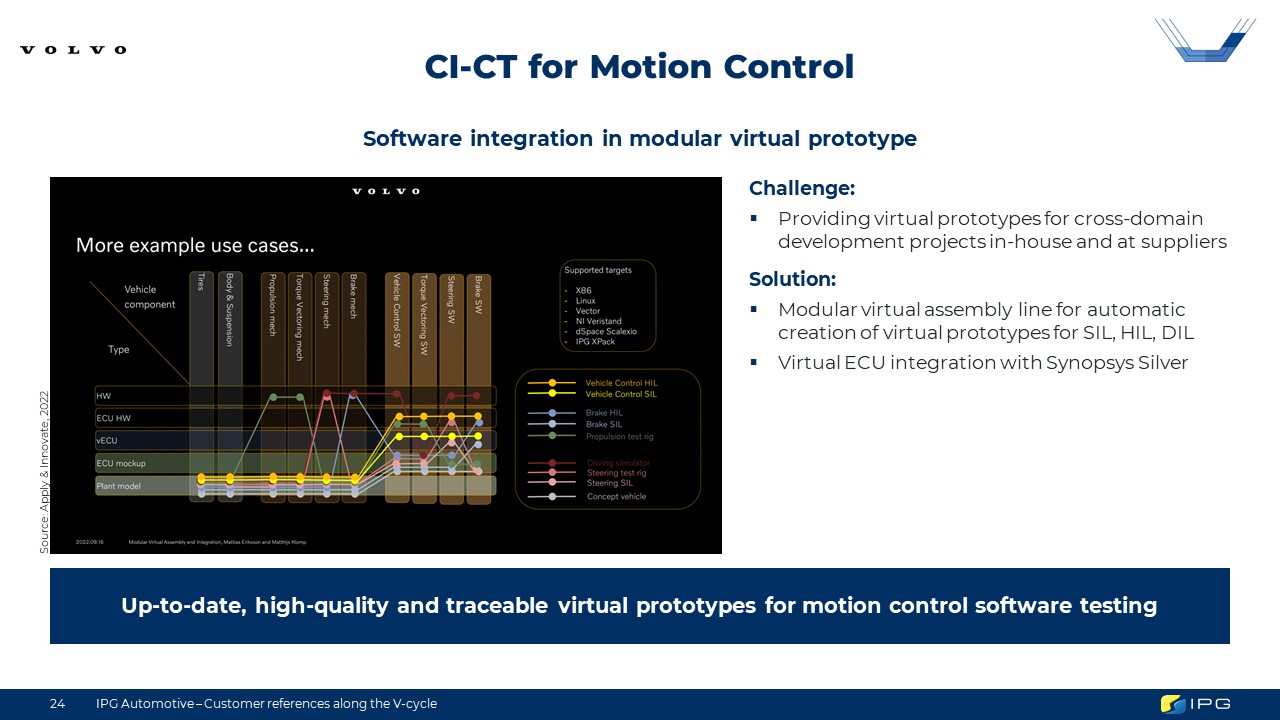
Systems can be tested seamlessly from the beginning of the requirement stage from MIL and SIL to HIL and VIL. In this process, scenarios from individual virtual test drives can be reused as needed to develop safety functions by themselves or in combination with other systems.
Your benefits at a glance
Increased flexibility
Analysis of system behavior in specific test scenarios
Time saving
Early check of compliance to requirements and robustness
Efficient system development
Preconfigured scenario catalogs and virtual NCAP tests
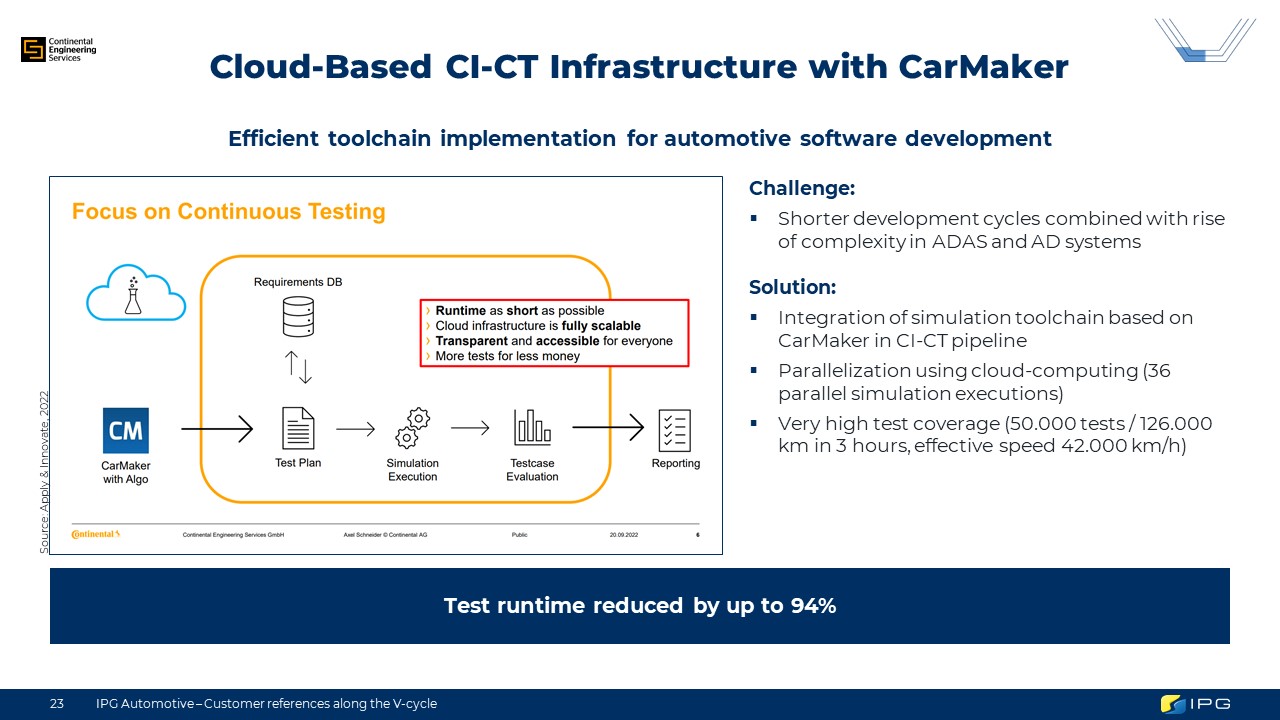
Reproducible and automated tests
Virtual test driving for individual test scenarios
Optimized development of active safety systems
For example emergency brake assist or lane change assist