Safety and comfort are the key sales arguments for a vehicle – which is why development should focus on these aspects.
They have become even more relevant since the increased use of embedded software and electronics, and the extensive networks they created have led to a sharp rise of the test effort.
Virtual testing allows to reduce the effort and to analyze the system itself as well as interactions with other systems.
Your benefits at a glance
Efficient development of comfort systems
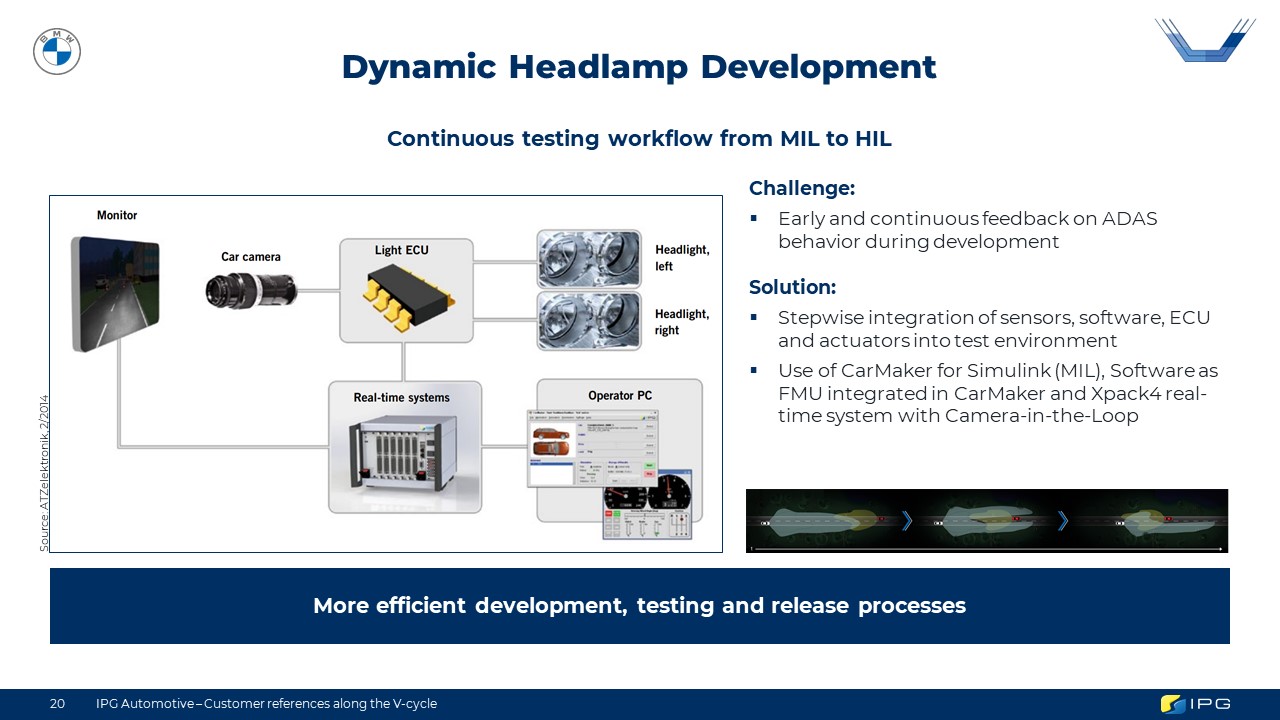
ACC systems, parking and lighting assistance systems
Early function tests
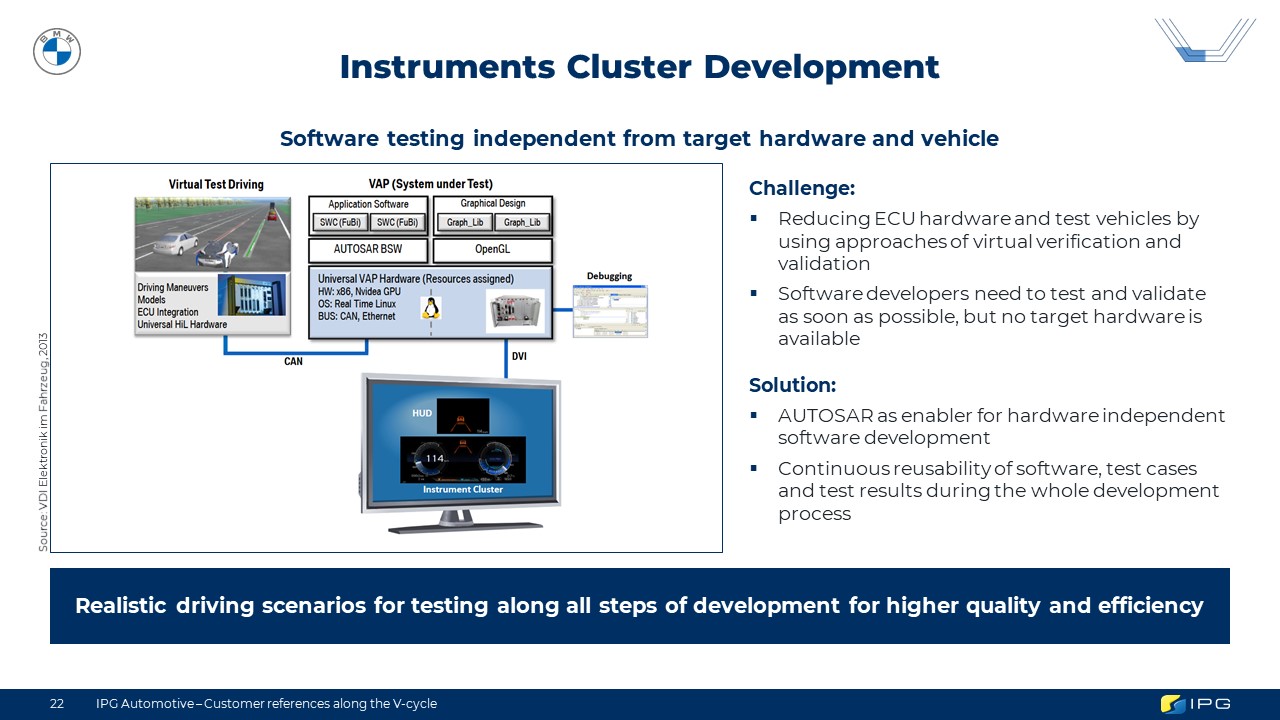
Evaluation of systems, their interactions with other systems and HMI interfaces
Development and optimization of information displays
Part of the HMI evaluation on the driving simulator
Easy generation of scenarios
From heavy traffic situations to rural driving
Increased flexibility
Functionality checks at different speeds and in various weather conditions
Simple and virtual robustness tests
Test algorithms for rare cases and ambiguous scenarios