Der virtuelle Fahrversuch unterstützt auch in der Entwicklung von Perzeptionsmodulen: Von der Generierung synthetischer Trainingsdaten bis hin zur Entwicklungsunterstützung und Validierung von Perzeption, Sensordatenfusion und Lokalisierung – sowohl im SIL- als auch HIL-Status. Erzeugung und Reproduktion von in der Realität extrem selten auftretenden Corner Cases machen Entwicklungsfortschritte nachvollziehbar.
Ihre Vorteile auf einen Blick
Realistische Sensorsimulation
Physikalisch valide, parametrierbare Modelle für alle gängigen Sensortypen (Kamera, Radar, Lidar, Ultraschall, GNSS)
Umfangreiche 3D Bibliothek
Inklusive Materialdatenbank – kein 3D Modellierungswissen nötig
Realistisches Umgebungsmodell
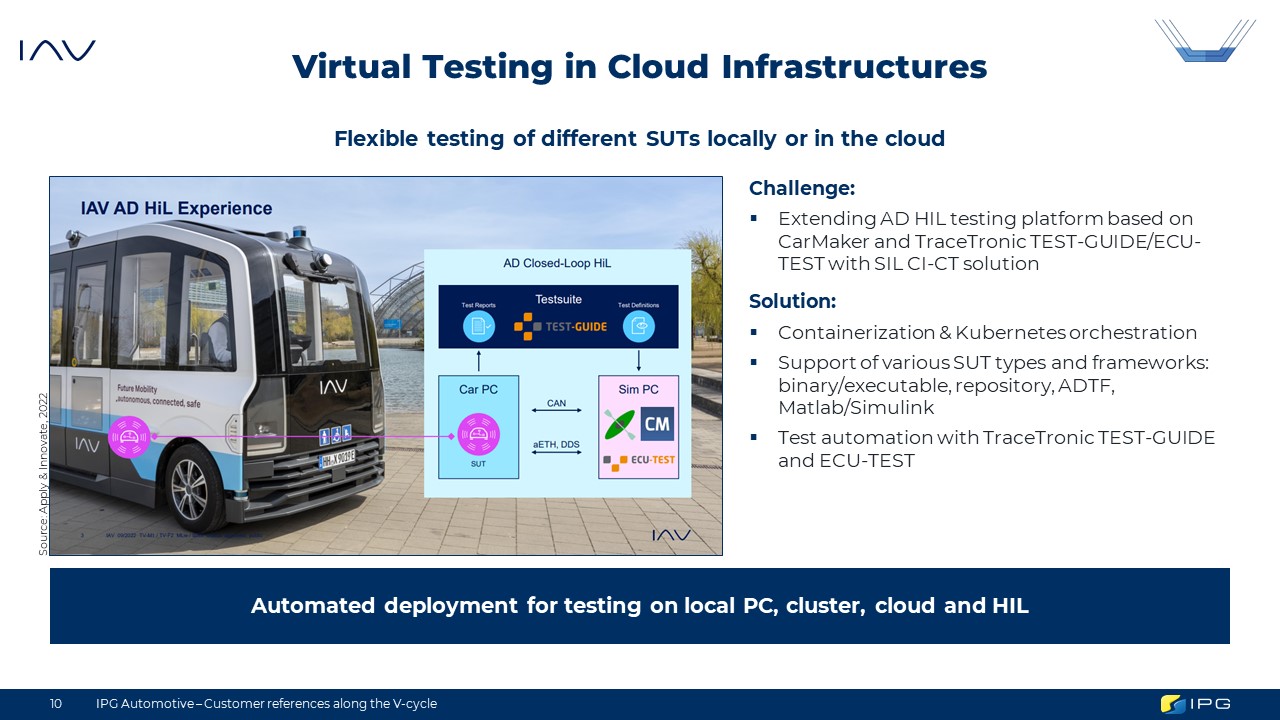
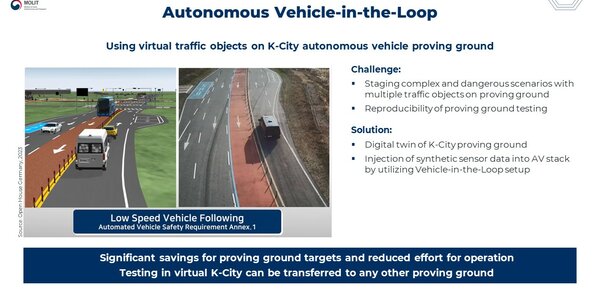
Aufbau von Digital Twins echter Straßenzüge
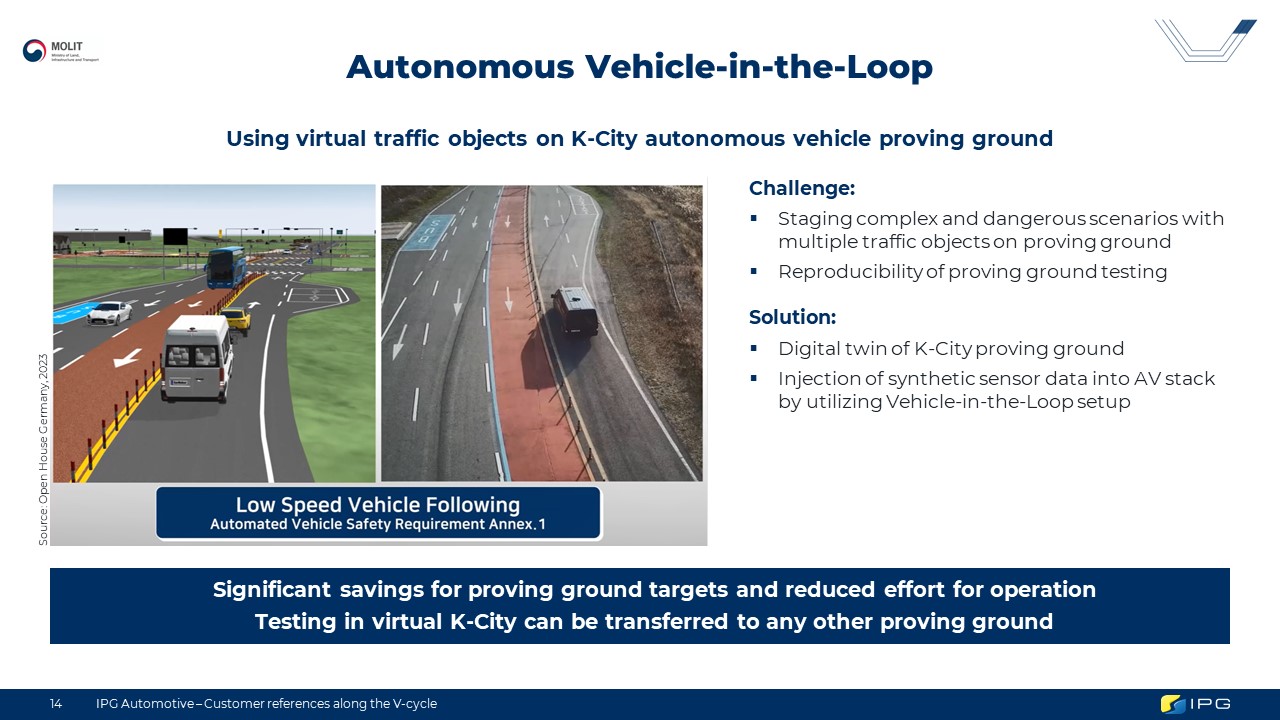
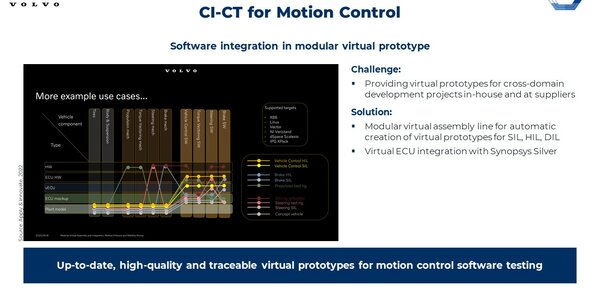
Closed-loop in allen Entwicklungsstufen
Test der Perzeptionssoftware (MIL/SIL) oder auch der Hardware (HIL) über Rohdateneinspeisung oder über Target Simulatoren
Flexible und optimierte Szenariogenerierung
Manueller oder automatisierter Aufbau auf Basis verschiedener Datenquellen
Fehlerfreie Ground Truth
Automatische Generierung der Ground Truth für automatisierte Performancebewertung oder synthetische Trainingsdaten für Machine Learning Algorithmen