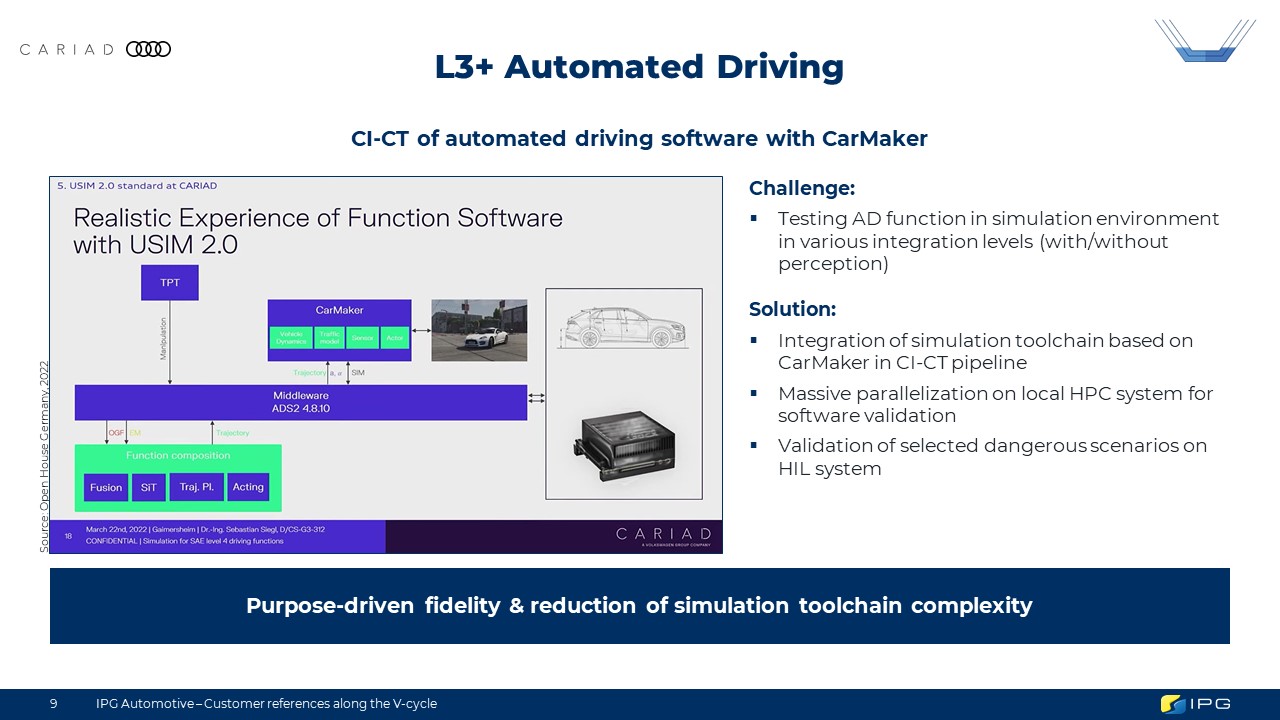
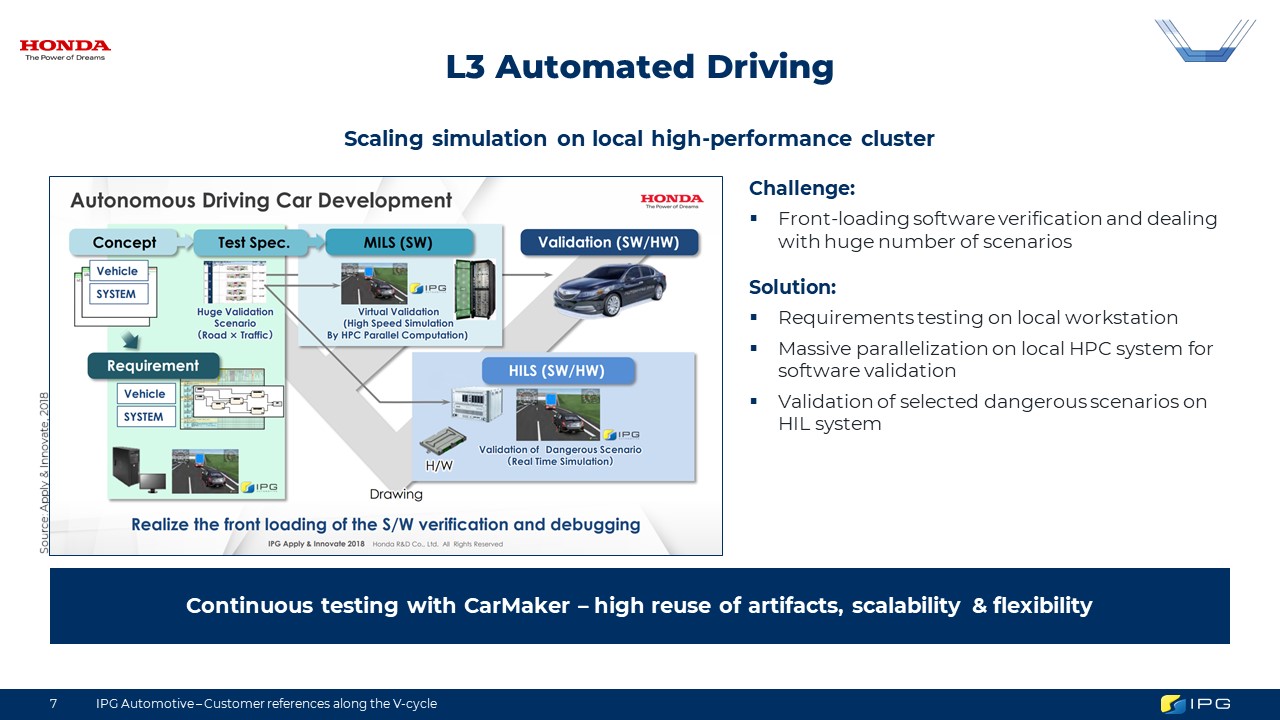
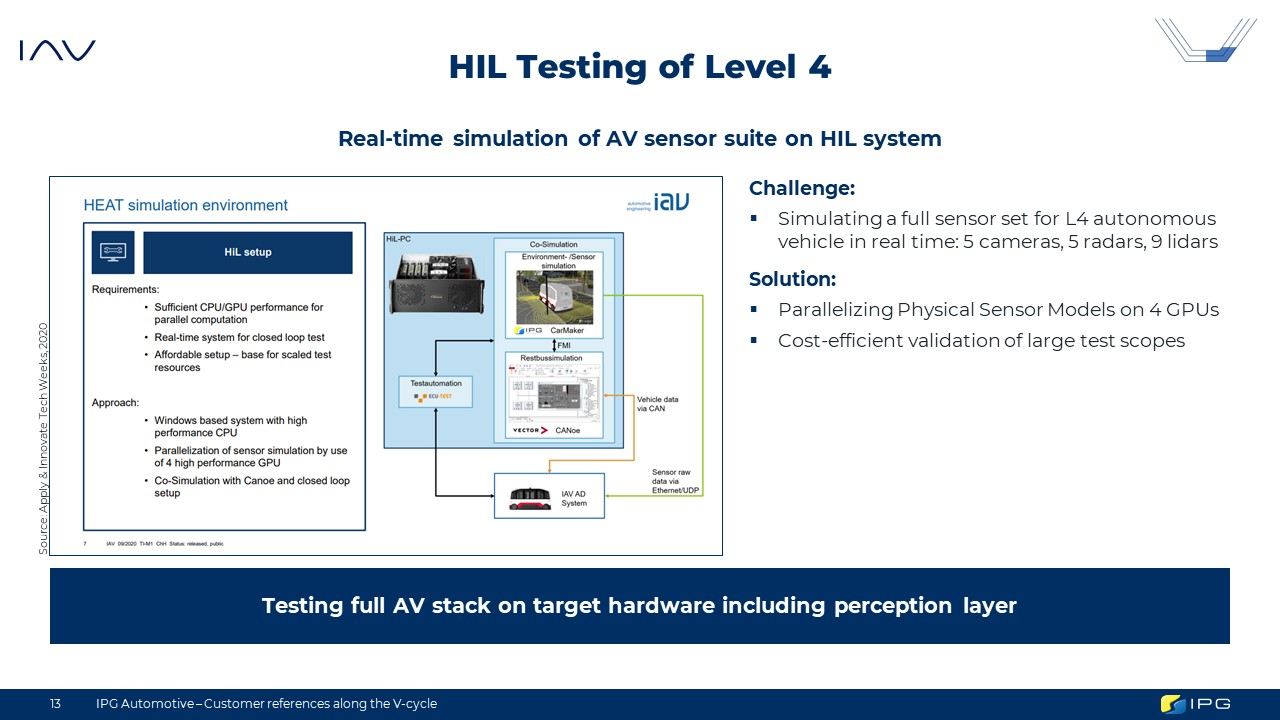
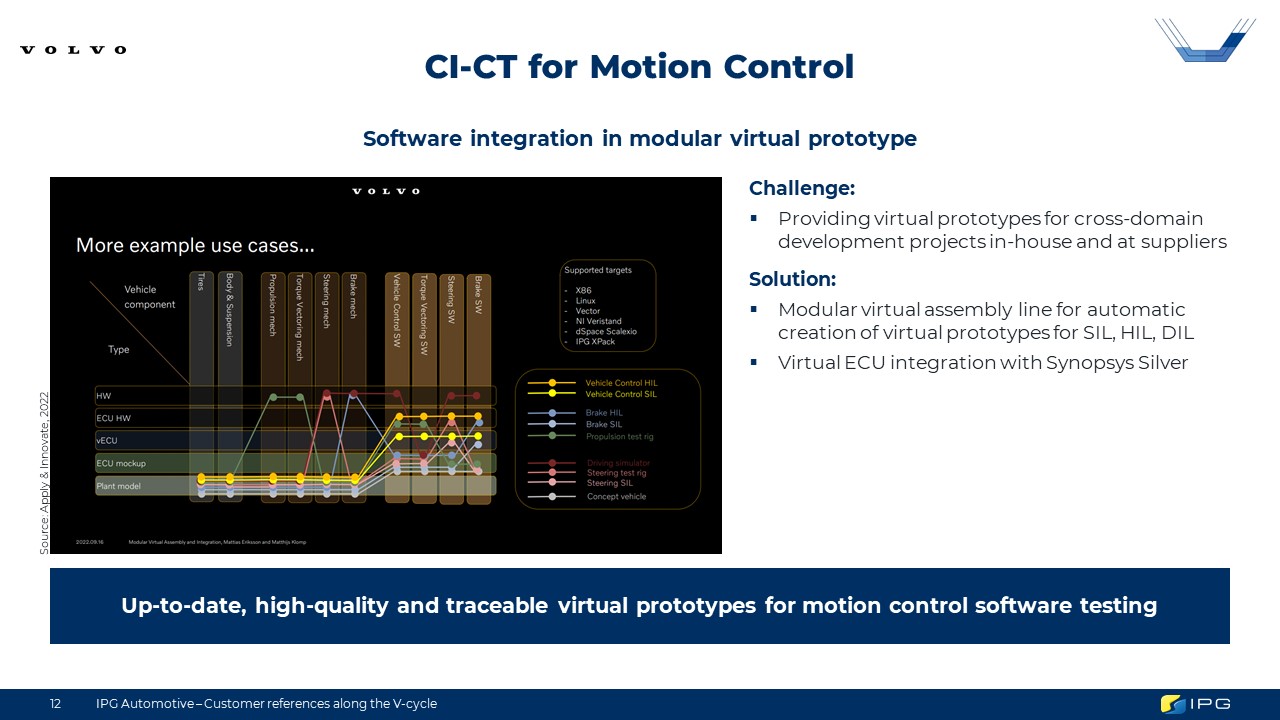
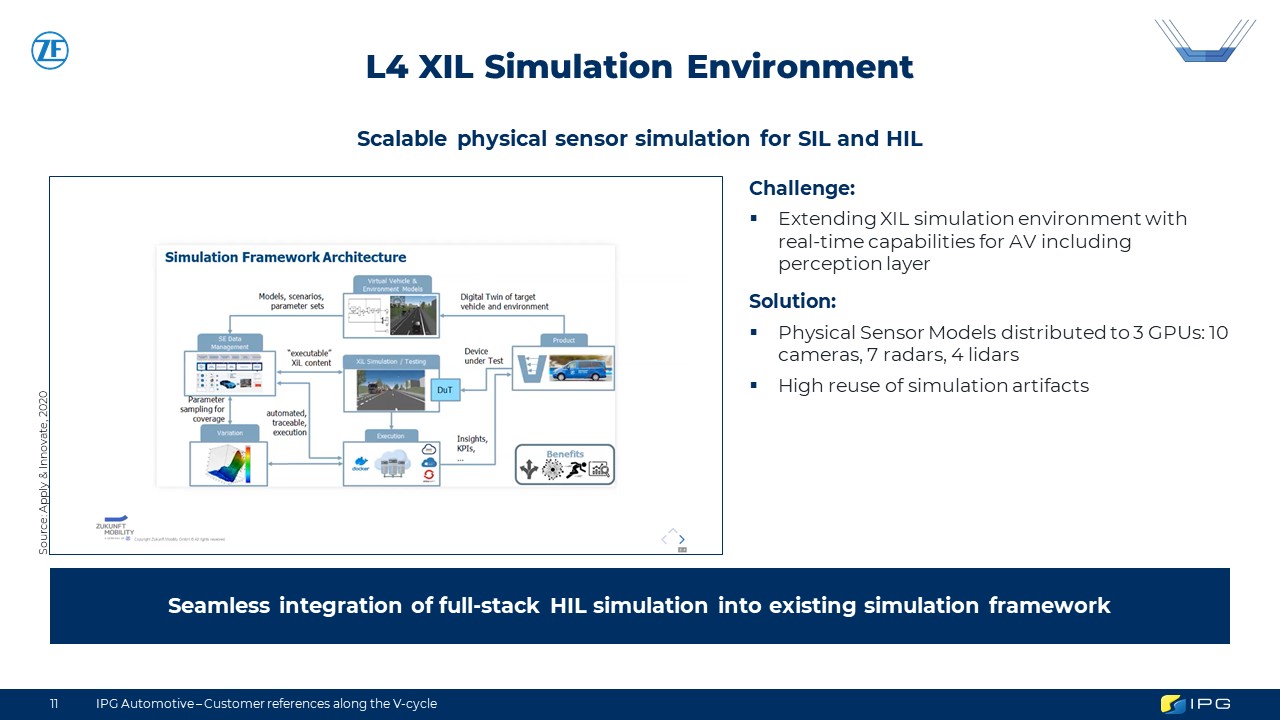
在测试各个模块(感知与定位、决策与运动规划、运动控制)之后,还可以使用仿真验证整个系统:即通过软件测试或测试真实传感器和处理器等硬件组件。为了收集必要的信息,必须掌握高速、真实的传感器模型和车辆动力学模型以及复杂的仿真场景。
优势一览
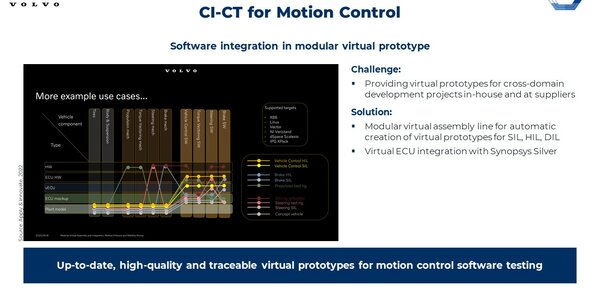
单一来源的完整仿真环境
车辆模型、传感器模型和环境仿真
物理有效性
具有各种复杂程度的久经考验的车辆动力学和传感器模型
灵活且优化的场景生成
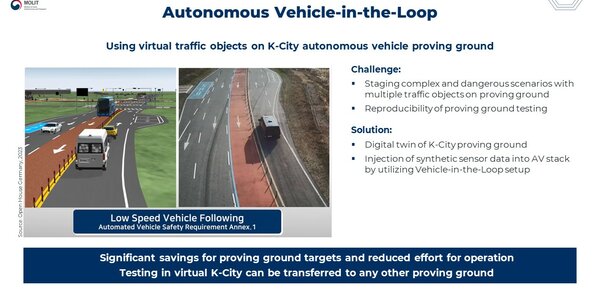
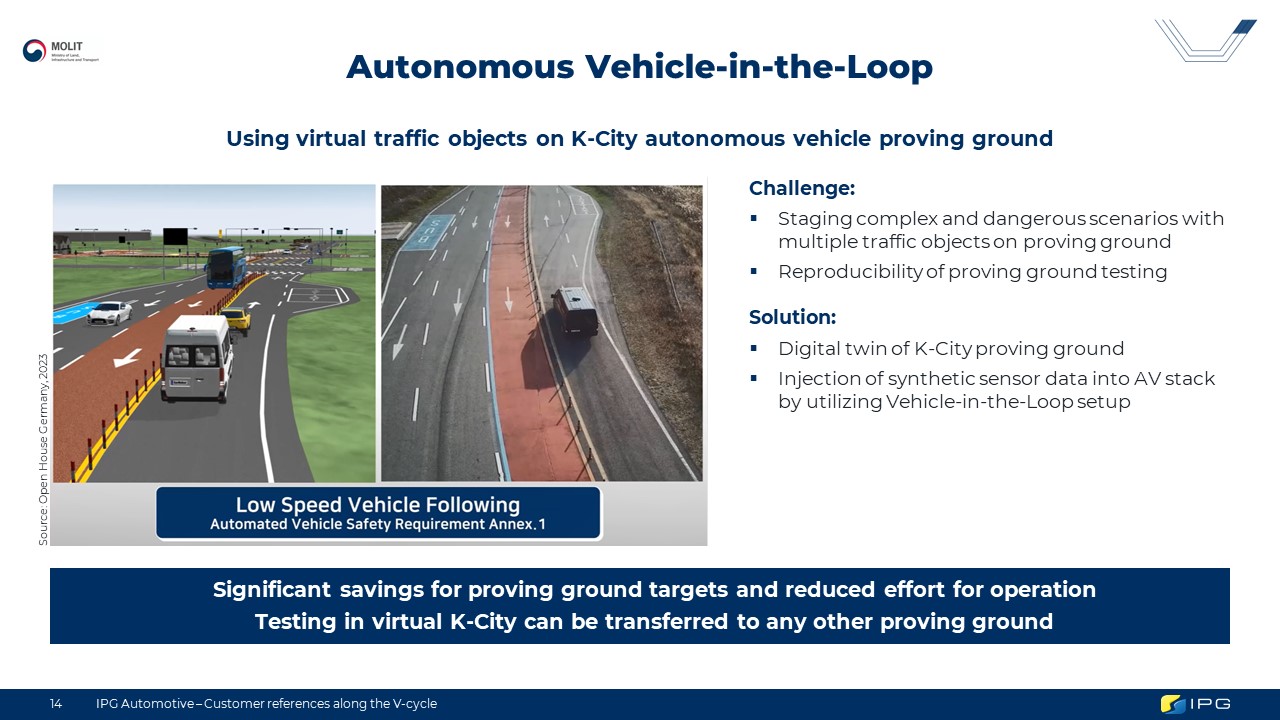
使用各种数据源进行手动和自动设置,兼容 ASAM OpenDRIVE 和 OpenSCENARIO
确定性和可重复性
仿真场景的精确再现性
应用的灵活性
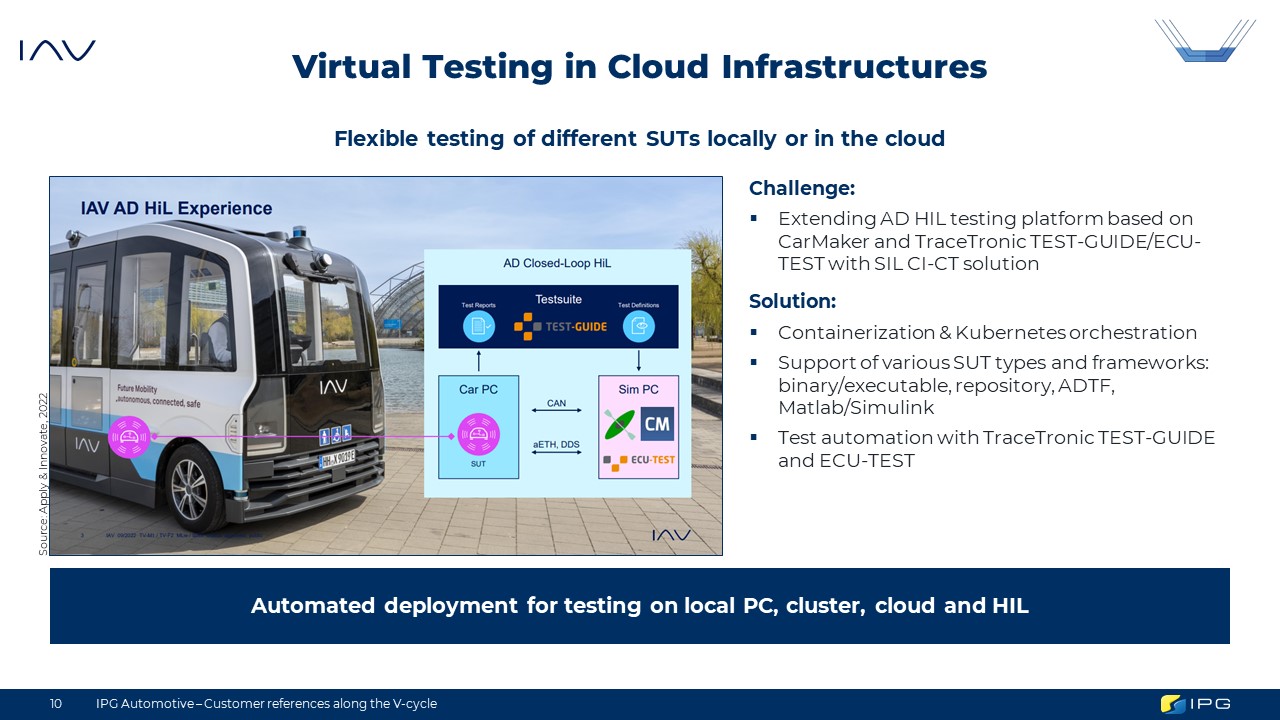
平台独立性:Windows、Linux、Ubuntu
使用 HIL 和 VIL 进行硬件验证
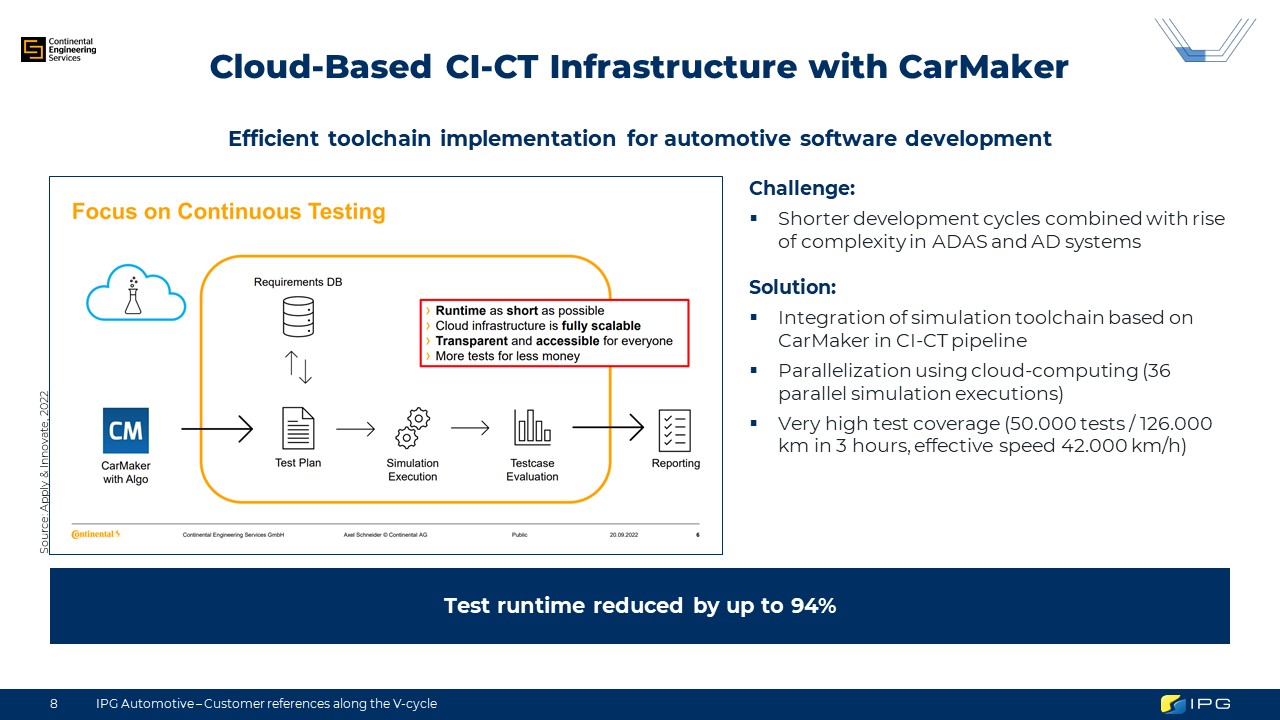
效率和可扩展性
最佳的性能、实时能力以及本地集群和云端的并行化