除了强大的感知之外,无人驾驶功能还依赖于安全、舒适和高效的决策与运动规划。 通过系统的仿真测试,可以在流程的早期发现并消除功能上的弱点。 全自动回归测试为开发团队提供了完善功能所需的时间。
灵活的环境模型
提供路面实况或现实目标列表
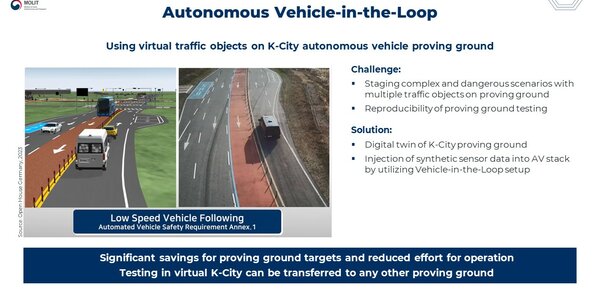
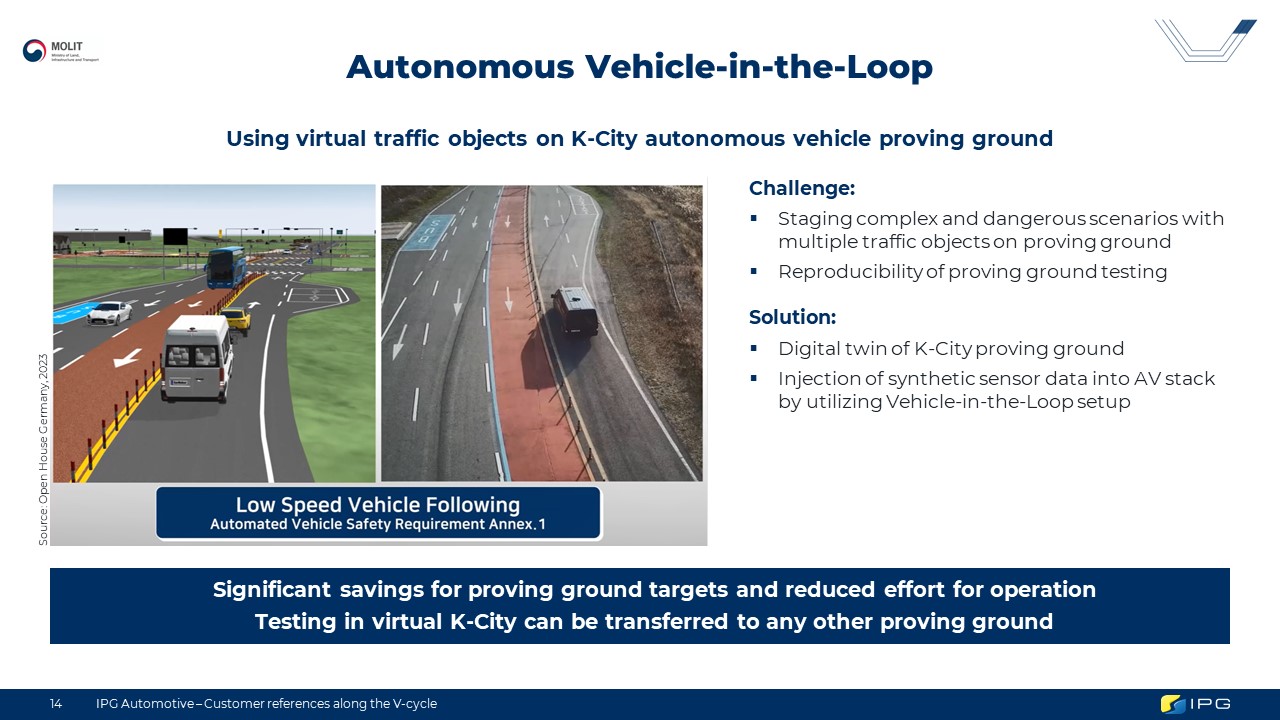
真实的交通仿真
跟随算法和车道变换行为
优化场景生成
使用各种数据源生成场景,包括与 ASAM OpenDRIVE 和 OpenSCENARIO 的兼容性
复杂的驾驶员模型
用于接管请求的仿真
卓越的自动化和可扩展性
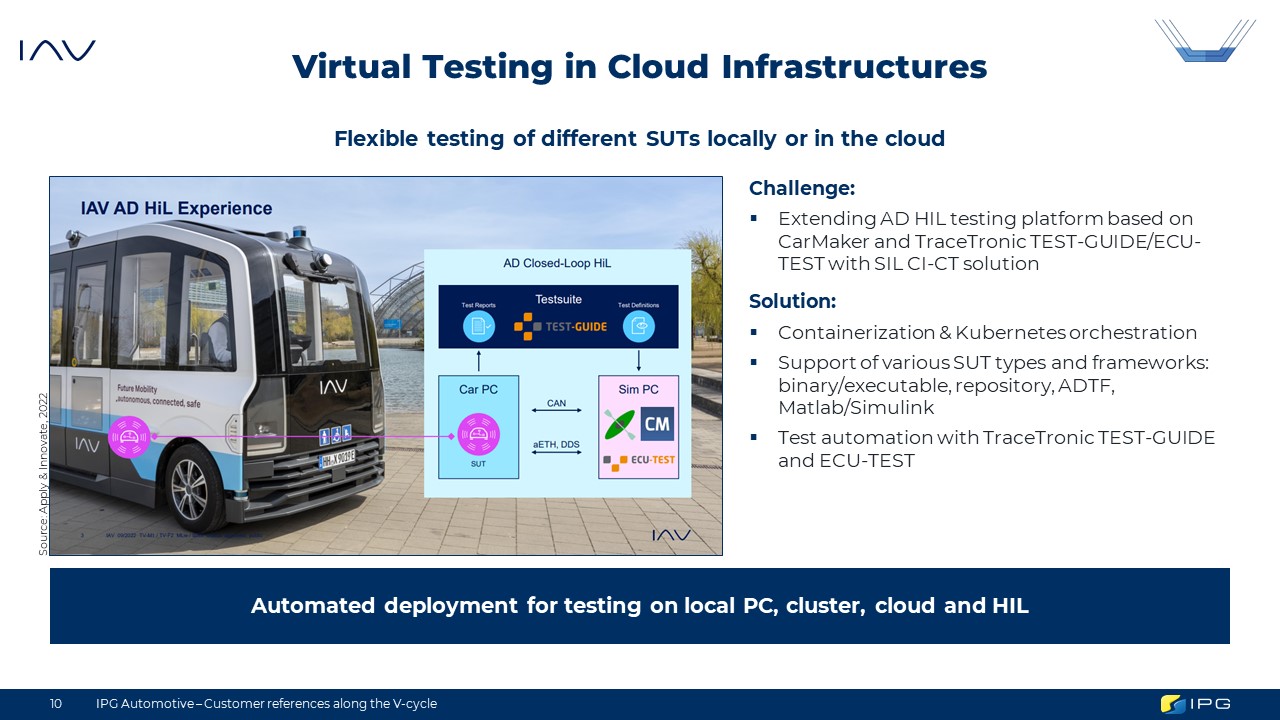
在本地或云端进行高效的回归测试
我们诚邀您咨询我们的专家团队
浏览我们的媒体库以获取更多专业知识,包括论文、手册、成功案例和视频。