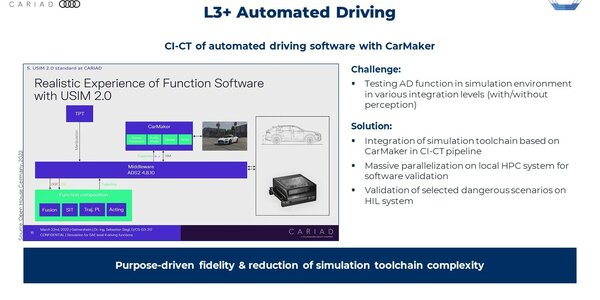
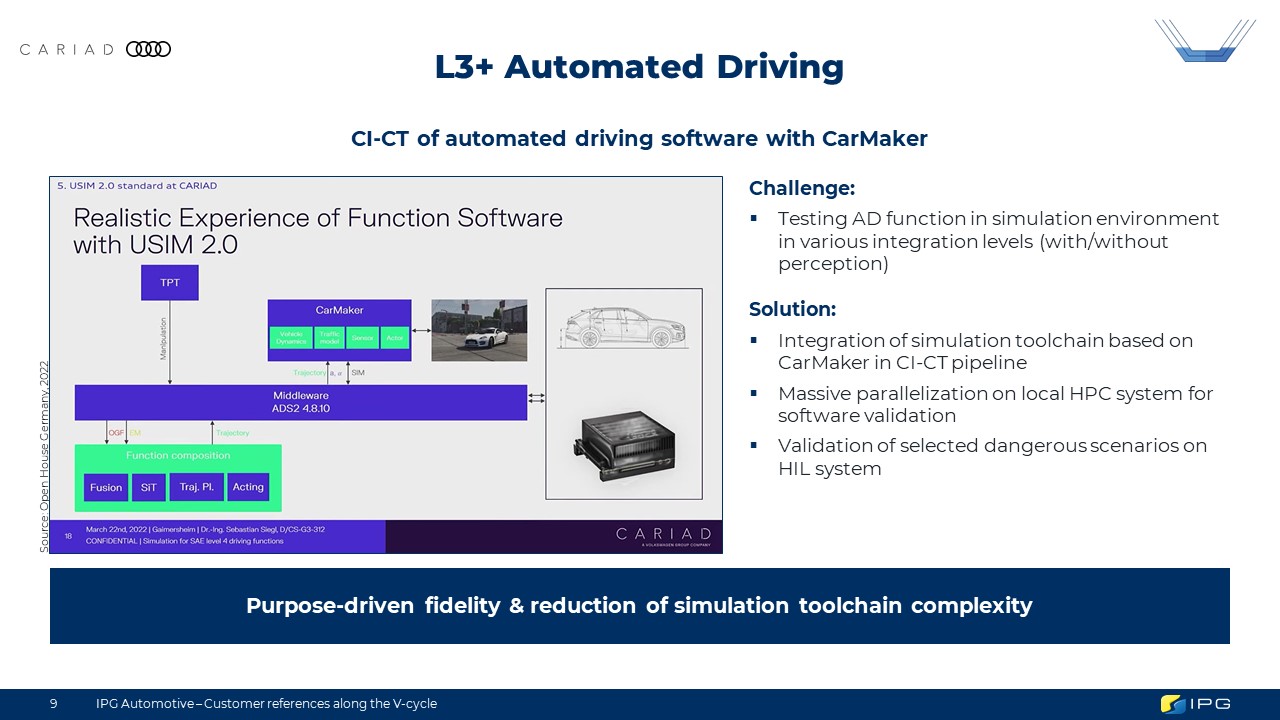
Les essais routiers virtuels favorisent également le développement de modules de perception : de la création de données d'entraînement synthétiques à un support de développement et à la validation de la collecte, de la fusion et de la localisation des données des capteurs - à la fois dans un environnement SIL et HIL. La création et la reproduction de cas particuliers, qui se produisent très rarement dans la réalité, facilitent le suivi des différents stades d'avancement.
Vos avantages en un coup d'œil
Simulation de capteurs réalistes
Des modèles paramétriques et physiquement validés pour tous les types de capteurs couramment utilisés (caméras, radars, lidars, ultrasons, GNSS)
Vaste bibliothèque 3D
Comprend une base de données de matériaux - aucune connaissance en modélisation 3D n'est requise
Modèle d'environnement réaliste
Développement de jumeaux numériques des routes du monde réel
Boucle fermée à tous les stades du développement
Test du logiciel de perception (MIL/SIL) et du matériel (HIL), à l'aide de données brutes ou de simulateurs cible
Génération de scénarios flexibles et optimisés
Configuration manuelle et automatique à l'aide de diverses sources de données
Des données de terrain sans failles
Génération automatique de la connaissance terrain pour l'évaluation automatisée des performances et des données d'entraînement synthétiques, pour les algorithmes d'apprentissage