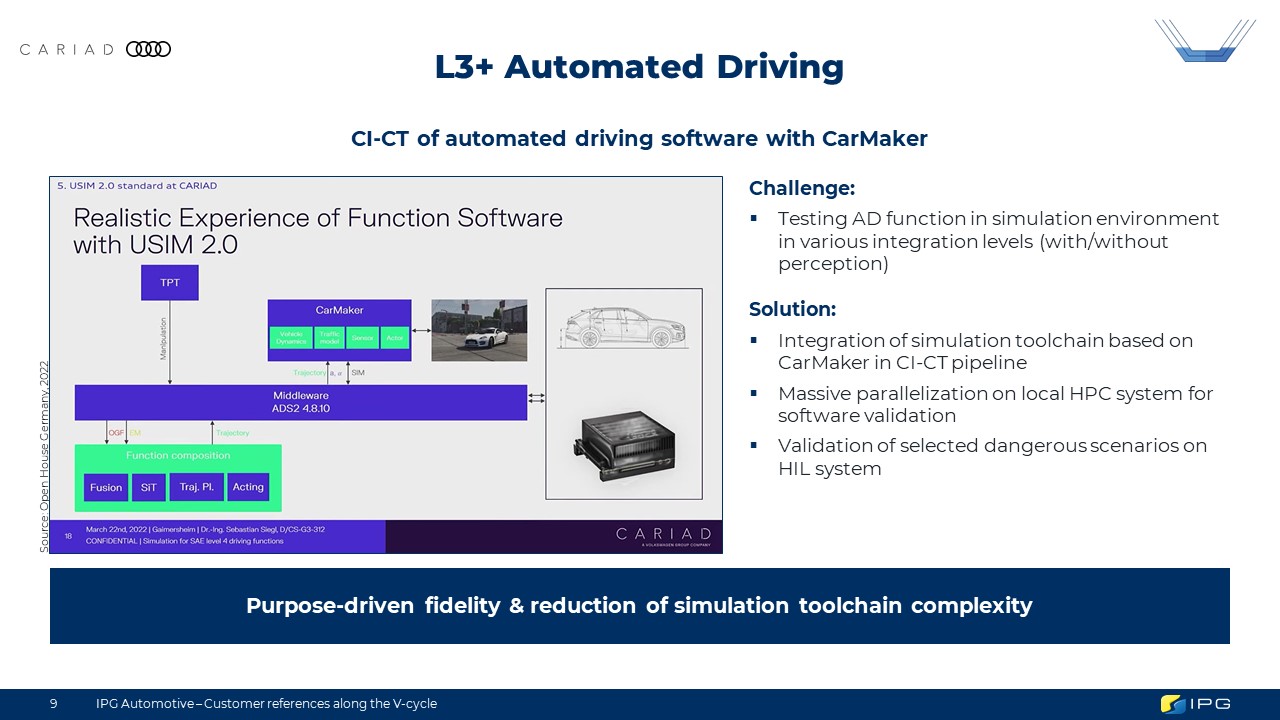
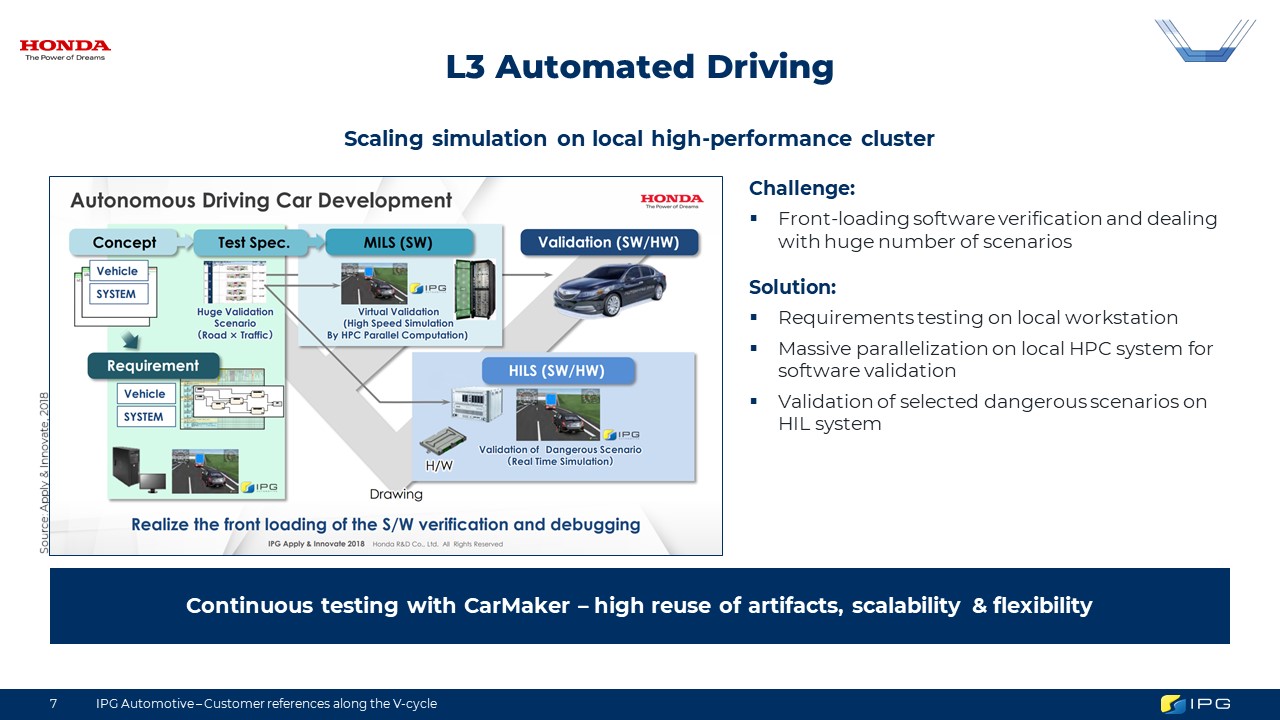
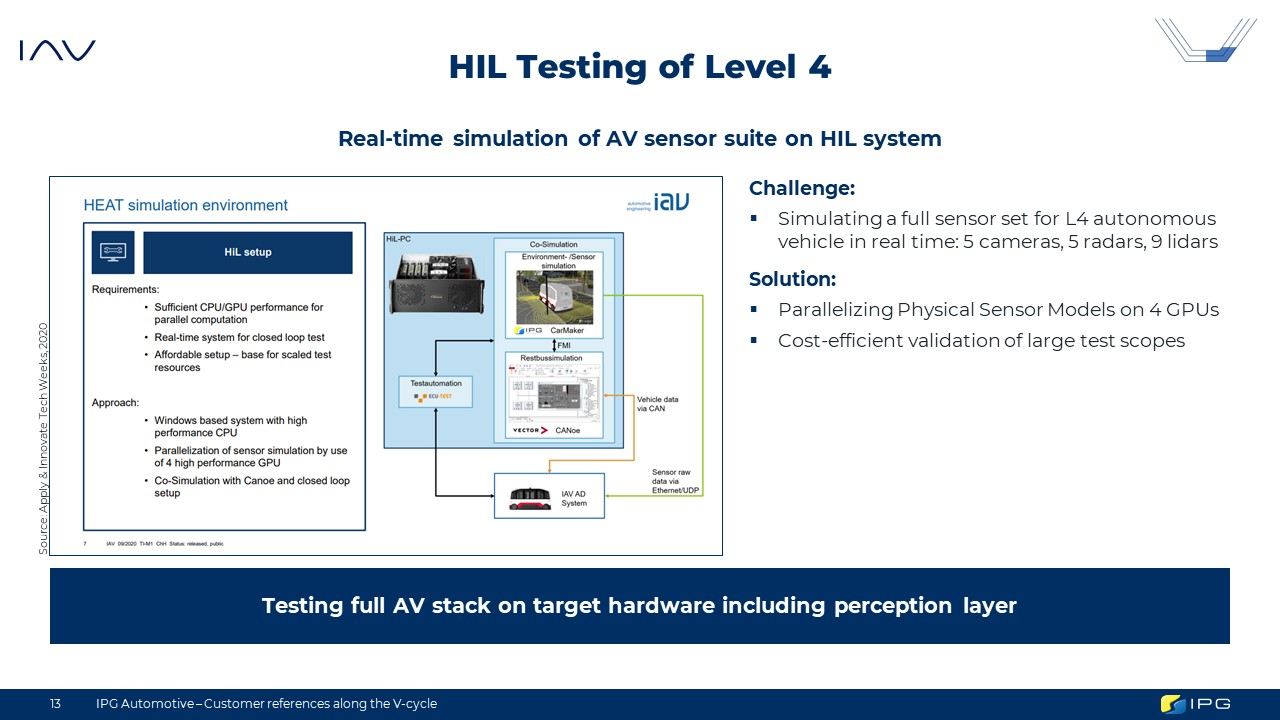
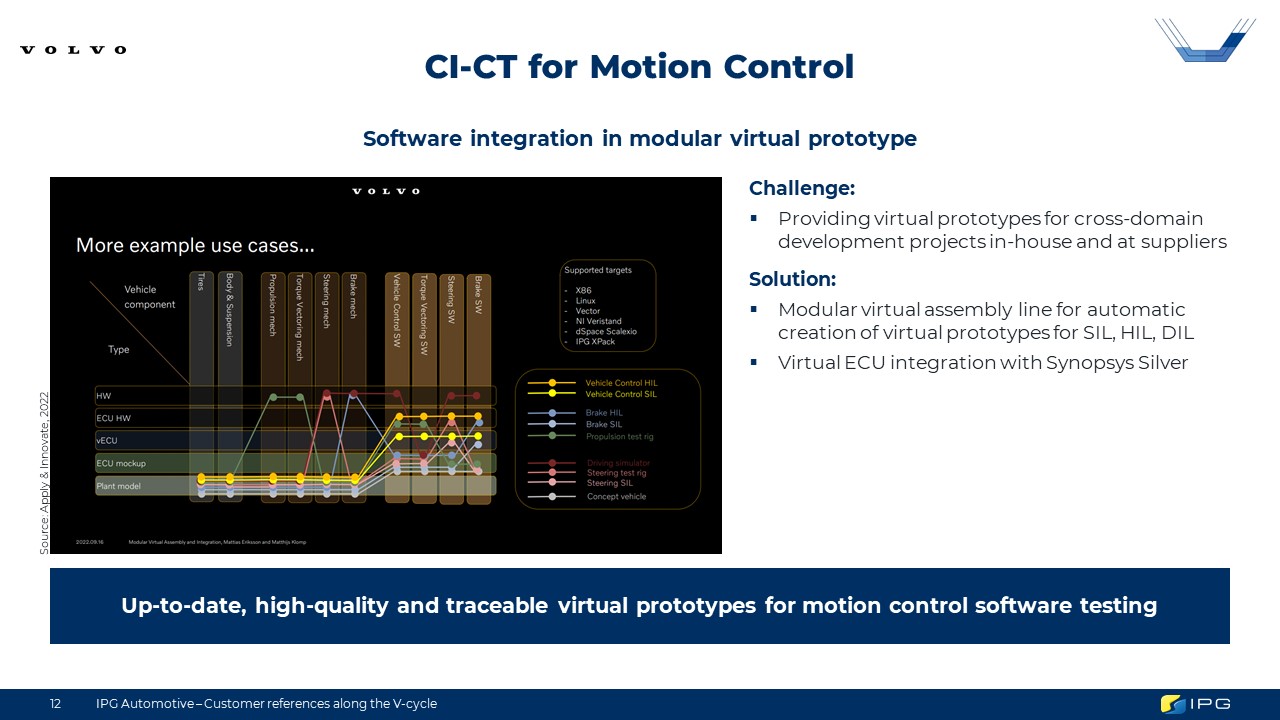
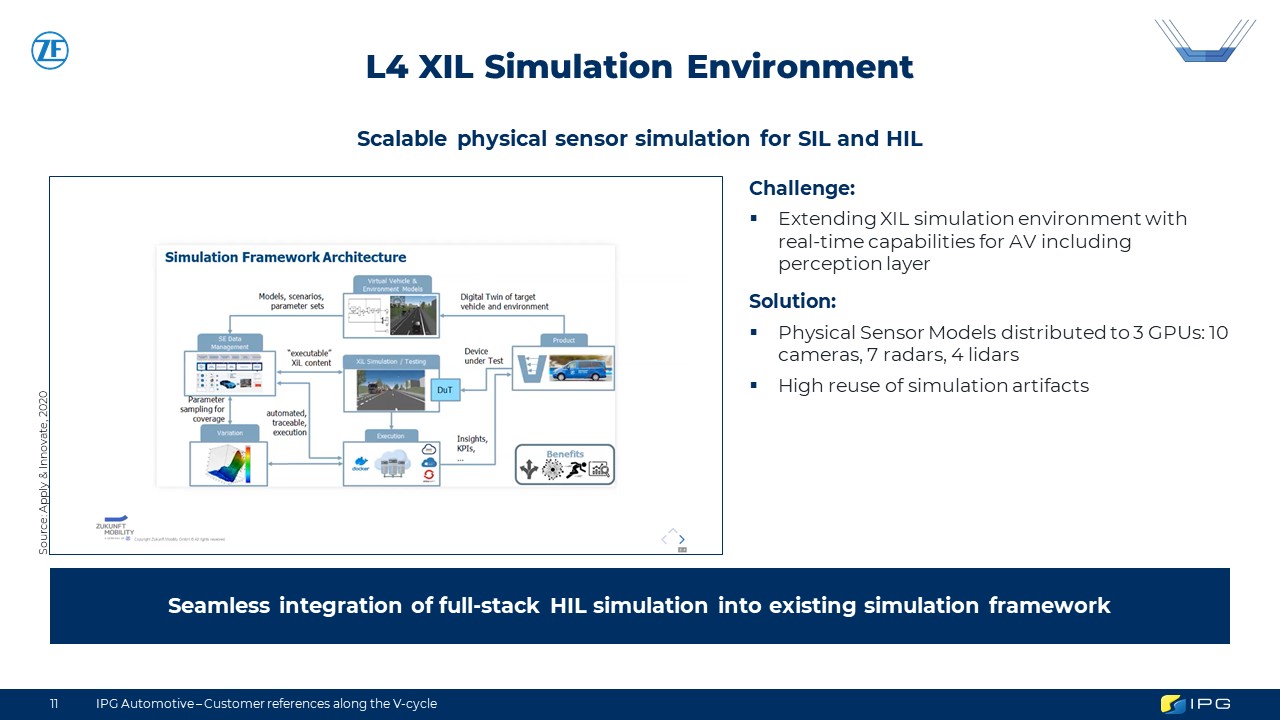
各モジュールのテスト(認知とローカリゼーション、意思決定と軌道計画、モーションコントロール)の完了後、シミュレーションによってシステム全体を検証することも可能です。ソフトウェアのみのテストも、実際のセンサやプロセッサなどのハードウェアコンポーネントを含むテストも可能です。必要な情報を収集するためには、高速でリアルなセンサモデルとビークル・ダイナミクスモデルを用意するとともに、複雑なシミュレーション・シナリオを正確に再現する必要があります。
Your benefits at a glance
単一の開発ツールで完全なシミュレーション環境を実現
車両、センサモデル、環境のシミュレーション
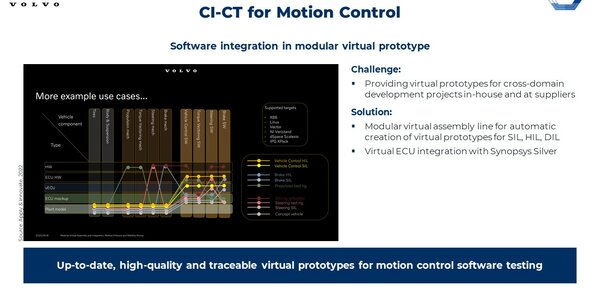
検証済のモデル
さまざまなレベルの複雑度で実証済みのビークル・ダイナミクスのモデルとセンサモデル
柔軟で最適化されたシナリオ生成
ASAM OpenDRIVEおよびOpenSCENARIOと互換性があり、さまざまなデータソースを使用した手動および自動セットアップが可能
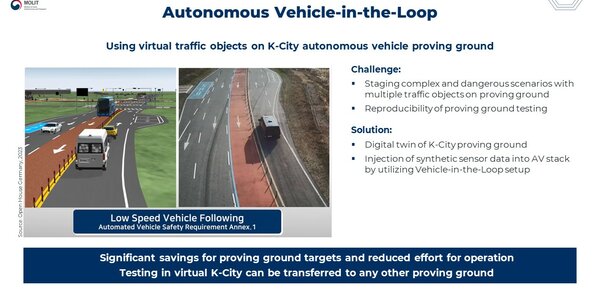
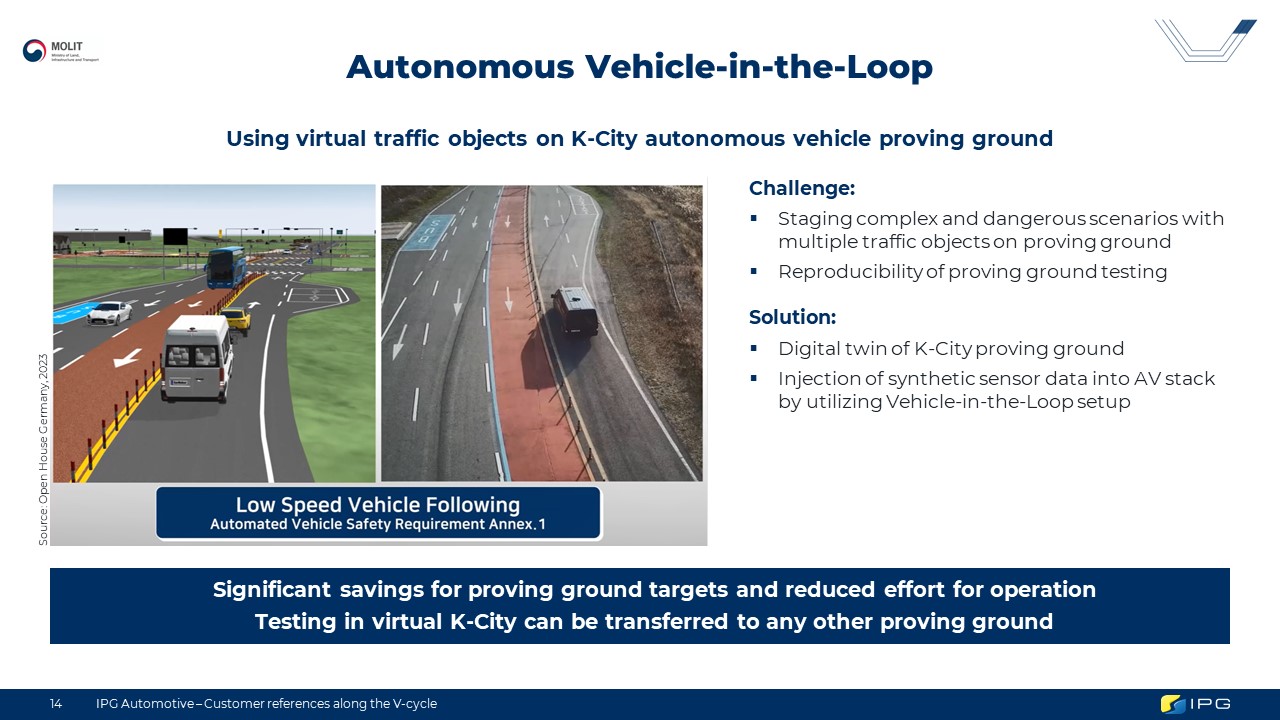
信頼性と再現性
シミュレーションのシナリオの正確な再現性
アプリケーションの柔軟性
プラットフォーム非依存:Windows、Linux、Ubuntu
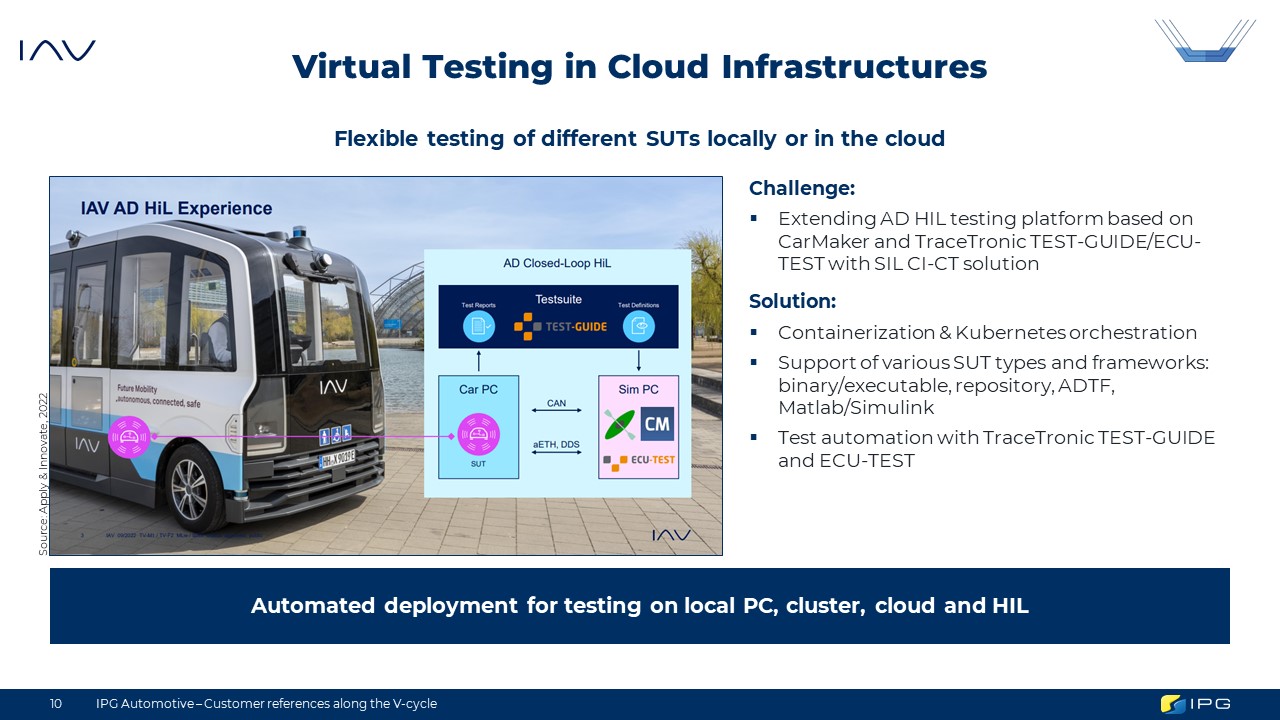
Hardware-in-the-LoopとVehicle-in-the-Loopを用いたハードウェアの検証
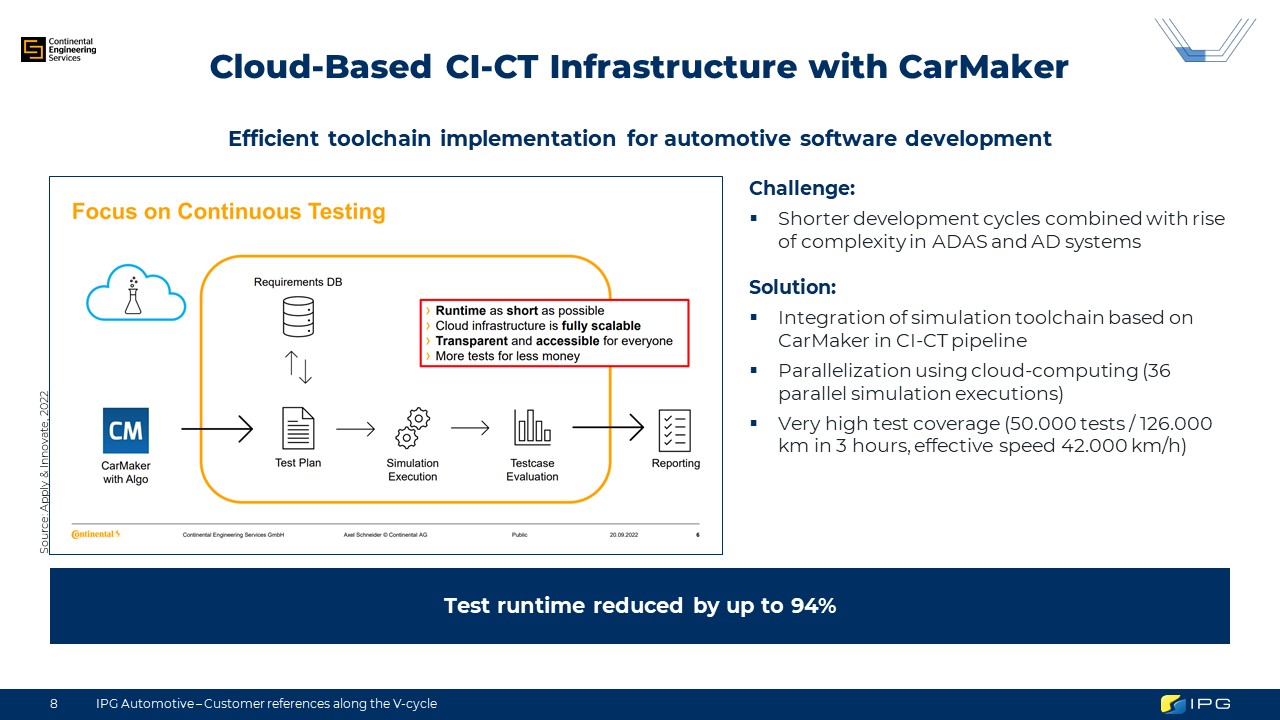
効率性とスケーラビリティ
ローカルクラスタやクラウド上で、クラス最高のクラス最高のパフォーマンス、リアルタイム機能、並列化を実現