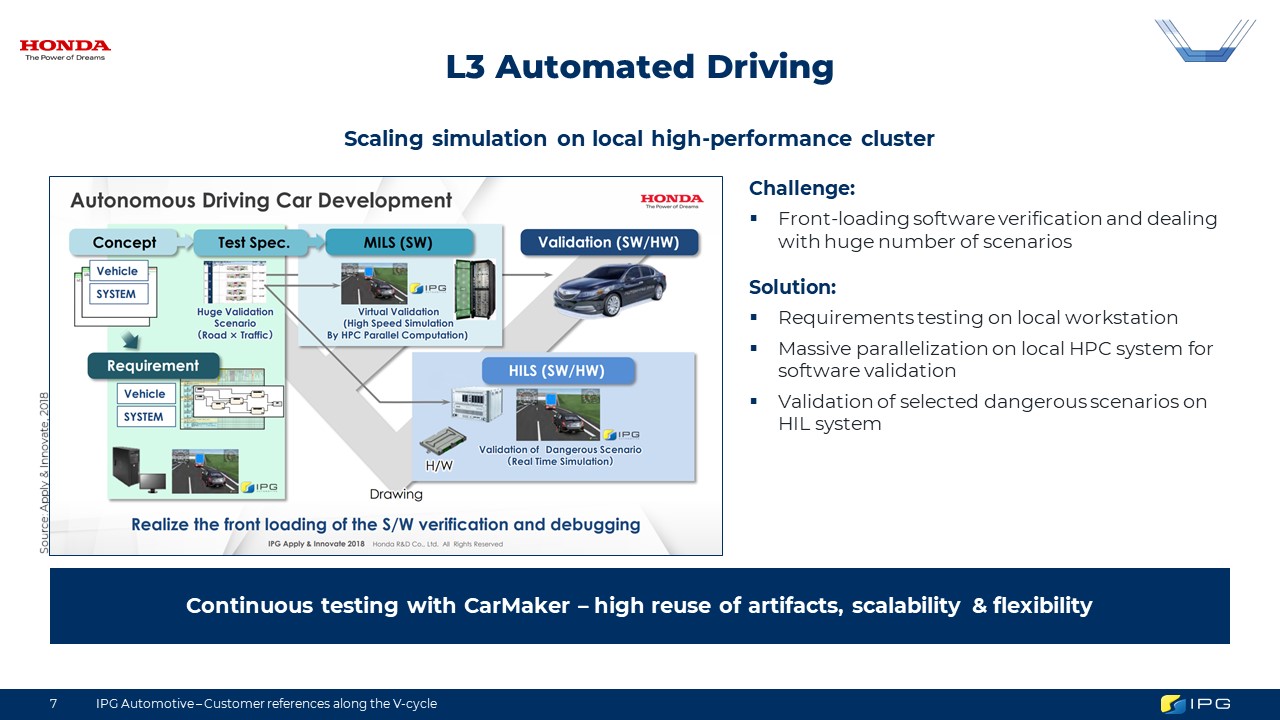
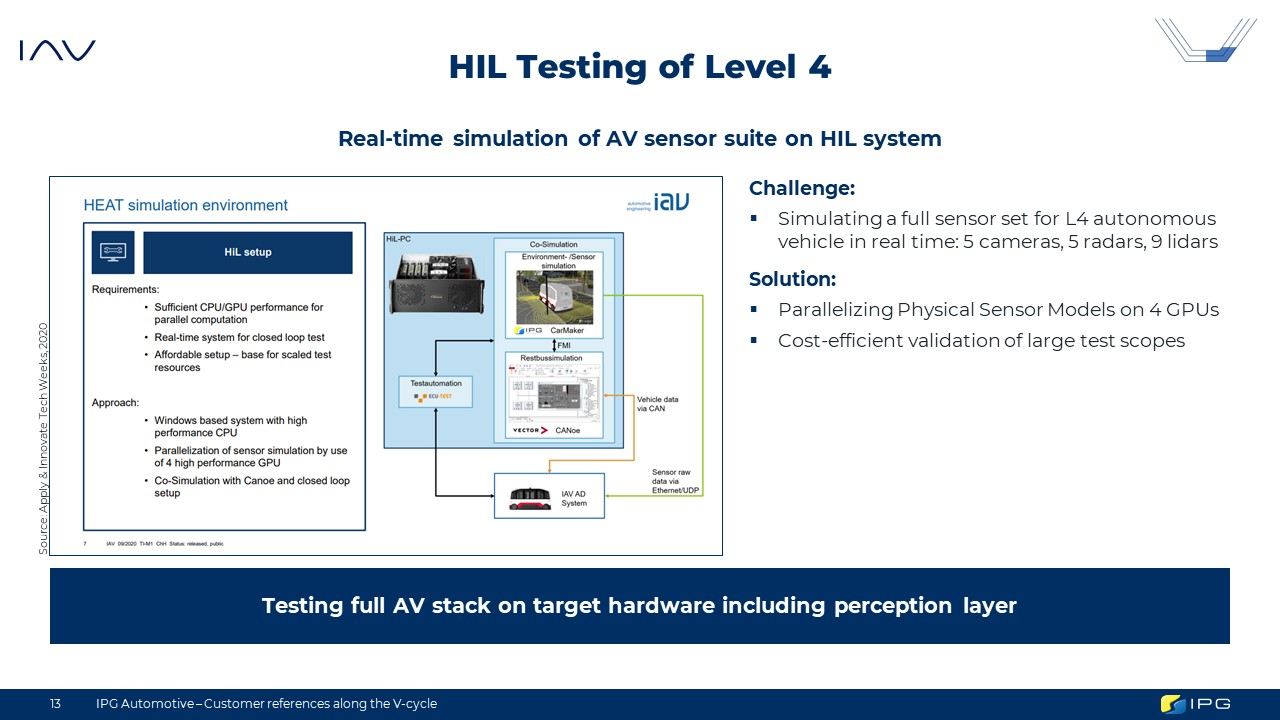
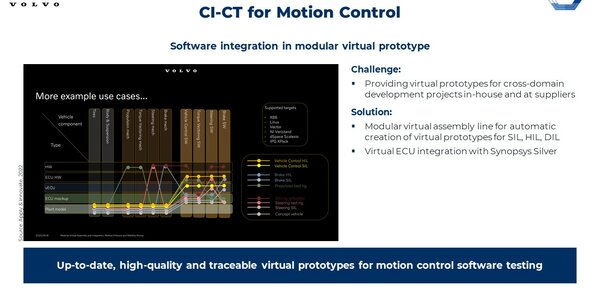
Après avoir testé les différents modules (perception et localisation, prise de décision et planification des mouvements, contrôle des mouvements), il est également possible de valider le système complet à l'aide de la simulation : soit uniquement avec les tests logiciels, soit avec des composants matériels tels que des capteurs et des processeurs en situation réelle. Pour collecter les informations nécessaires, il est essentiel de disposer de modèles de capteurs et de dynamique véhicule rapides et réalistes, ainsi que des scénarios de simulation complexes à maîtriser.
Vos avantages en un coup d'œil
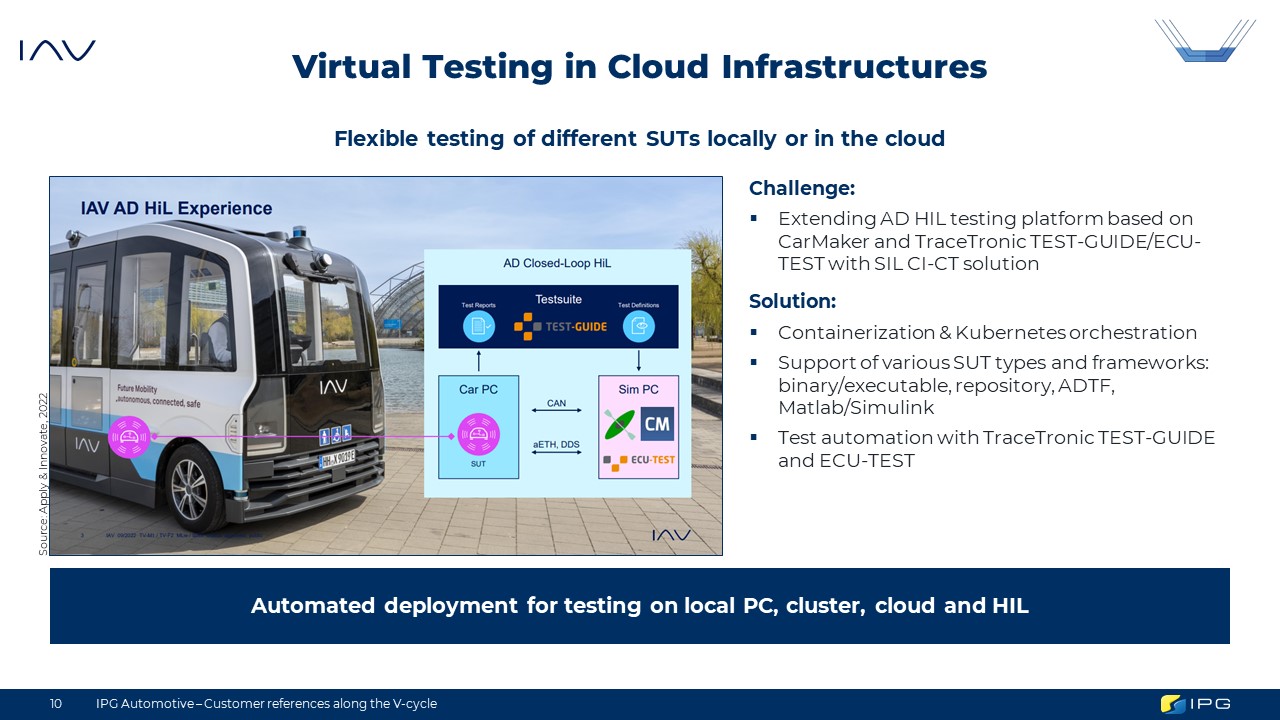
Environnement de simulation complet à partir d'une source unique
Simulation de véhicules, de modèles de capteurs et d'environnement
Déterminisme et reproductibilité
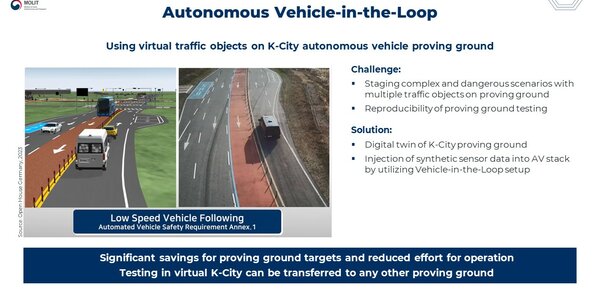
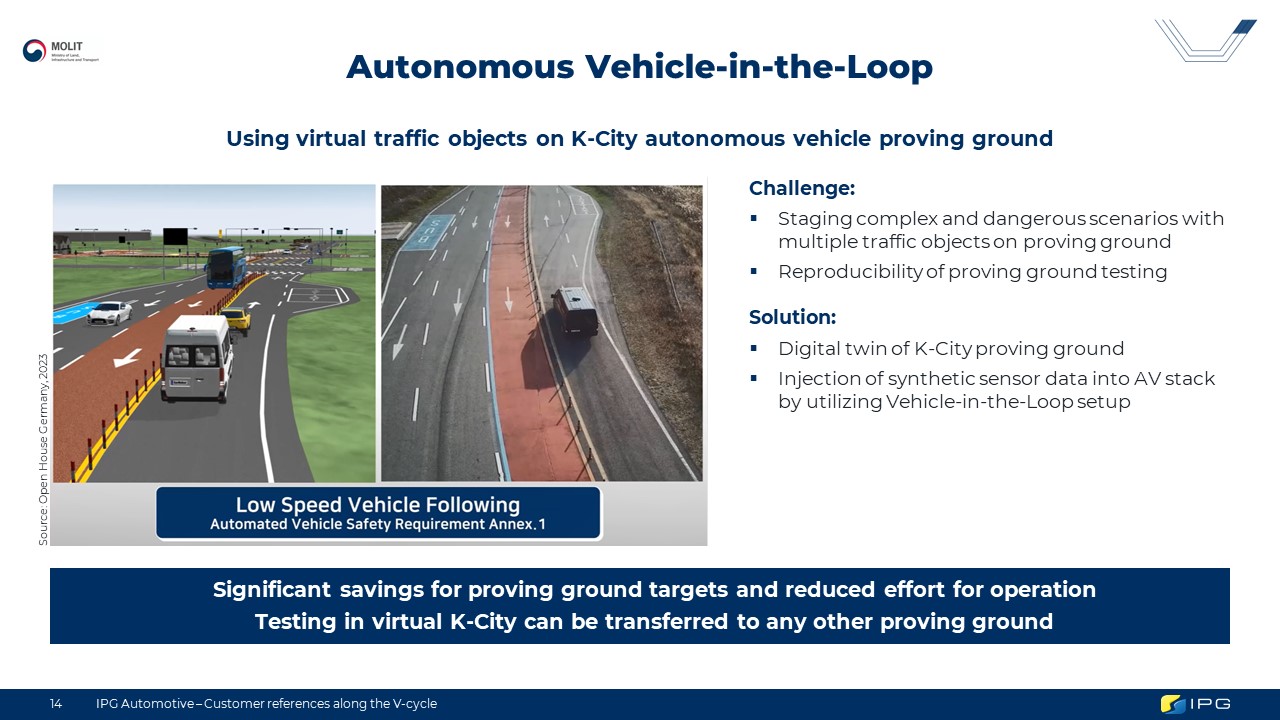
Reproduction précise des scénarios de simulation
Génération de scénarios flexibles et optimisés
Configuration manuelle et automatique utilisant diverses sources de données, compatibilité avec ASAM OpenDRIVE & OpenSCENARIO
Validité physique
Modèles éprouvés en matière de dynamique du véhicule et de capteurs, avec différents niveaux de complexité
Flexibilité des applications
Indépendance de la plate-forme : Windows, Linux, Ubuntu. Validation du matériel à l'aide de HIL et VIL
Efficacité et évolutivité
Hautes performances de premier ordre, capacité en temps réel et déploiement en parallèle sur des clusters locaux et des clouds