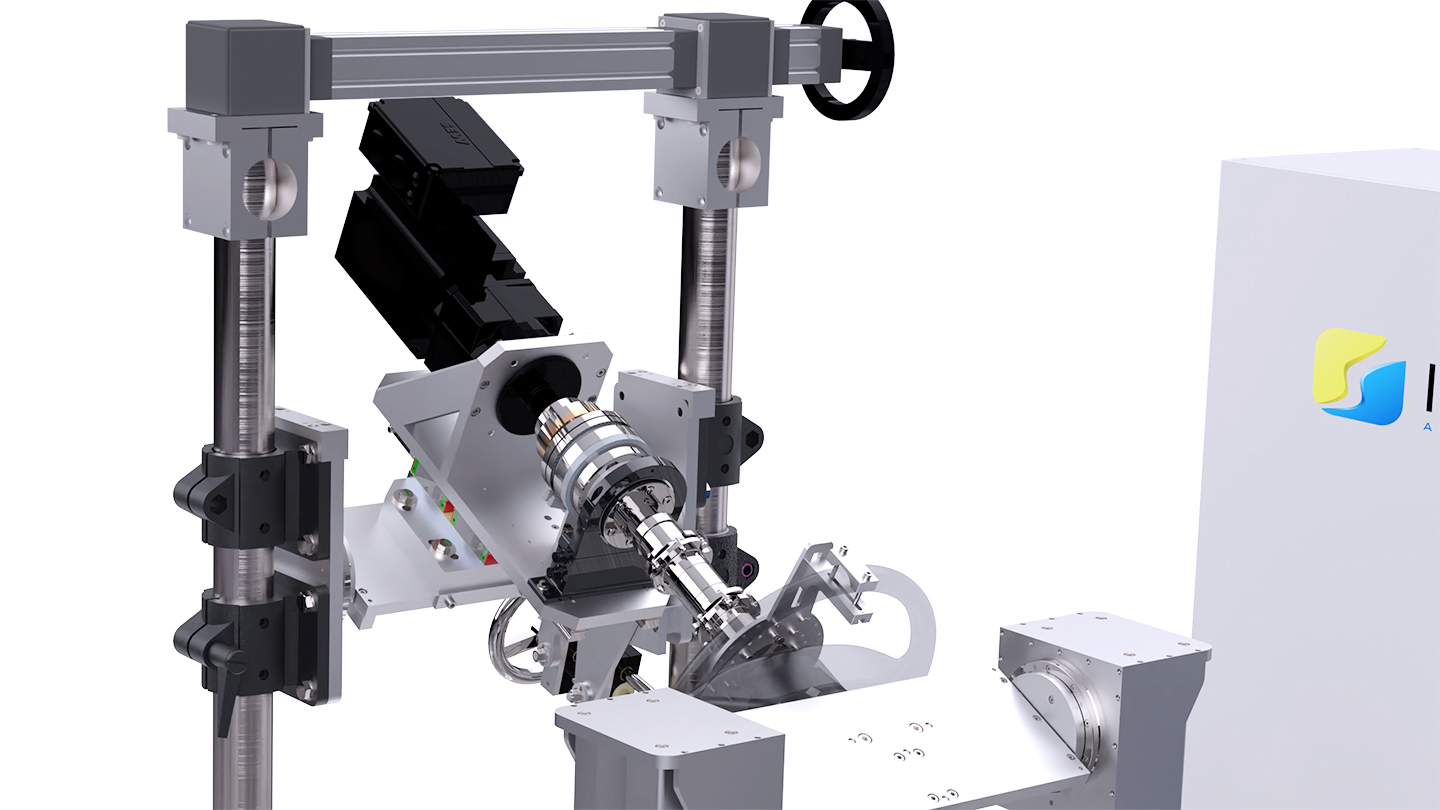
Steering-in-the-Loopテストシステムは、閉ループおよび開ループマヌーバで実際のステアリングシステムの試験を可能にします。正確で再現性のあるステアリング角度の入力のために、優れたダイナミックステアリングロボットを採用しています。ドライバ・イン・ザ・ループへと拡張すれば、ステアリングの性能をすぐに体感できます。
タイロッドにかかる力は、現在の運転状況に応じたシミュレーションまたは測定値に従いリニアアクチュエータによって負荷されます。
Functions
- 電動ステアリングコラムマウントの調整
- ステアリング角とトルクを入力するためのステアリングロボット
- オプションとして、テストドライバからの実際のステアリングデータを入力し、ドライバ・イン・ザ・ループとしての使用が可能
- 垂直方向に調整可能なタイロッド角度(静的)
- ステアリングホイールとステアリングロボットの簡単で正確な位置合わせ
- サスペンションとADAS ECUを組み合わせたマルチドメインHILシステムへの拡張
- ステアリングホイールとタイロッドの位置、力、トルクの正確な測定
- 試験中の装置の消費電力の検出
アプリケーション領域
- 電動ステアリングシステムのコンポーネントを簡単に統合できる自動運転機能試験
- 機能、性能、分散分析試験による制御ユニットの最適化
- ホモロゲーションテストの実施
- ビークルダイナミクスとADAS分野におけるステアリング機能の試験
- 全輪/後輪操舵調査
- ステア・バイ・ワイヤアプリケーション
- CarMakerであらゆる運転シナリオを実行
- MBSサスペンションモデル、タイヤ、車両などによるアクティブシステムのシステム最適化
Your benefits at a glance
アクチュエータとセンサの低レイテンシ(遅延時間)
ハードウェア、ソフトウェアならびにテストベンチのオペレーションと調整をシングルソースで提供
簡素化
利用可能なTestRunsにより、使いやすさが向上
重要なテスト結果
最高の精度を出すために最適化された測定
高速かつ正確な制御
最高のダイナミクスと正確な制御のためのサーボおよびリニアモータの使用
広範なテストの自動化
完全なテストカタログを適用(ISOステアリングマヌーバ、Euro NCAP、お客様固有の試験)
EtherCAT通信
Technical data

- 最大力(左右それぞれ) – 20 KN
- 平均力(左右それぞれ) – 12 KN
- アクチュエータの可動範囲 – - 200 mm
- 最大速度 – +- 1m/s
- ピーク時トルク – 120 Nm
- 平均トルク – 50 Nm
- 最大ステアリングホイール速度 – 1800 deg/s

- ステアリング・イン・ザ・ループテストベンチ用のリアルタイム設定
- シャシーやADAS用ECUの統合を含むマルチドメインHILプラットフォームに拡張可能
ハンズオフクラッチ
オプションのクラッチシステムは、ステアリングロボットの力伝達を切り離します。それにより、ISO7401にしたがってステアリングリターン(横方向の過渡応答テスト)の決定的で再現性のある使用について検証が可能です。また、新しいステアリングコラムとの接続の設計により、回転慣性モーメントを正確に調整し、実際の設定を詳細にモデル化することが可能です。
ドライバ・イン・ザ・ループプラットフォーム
ドライバ・イン・ザ・ループは、実際のドライバがステアリング性能を試験するために統合できるオプションのプラットフォームです。このプラットフォームは、ステアリングロボットとドライバプラットフォーム間の迅速かつ容易な切り替えを可能にします。テストベンチでは実際のドライビングポジションに調整でき、運転席から操作できるため便利です。