
OPEN HOUSE
The meeting point for the virtual test driving industry
![[Translate to English:] Open House CarMaker 12](data:image/gif;base64,R0lGODlhAQABAAD/ACwAAAAAAQABAAACADs=)
Gain exclusive insights
One day, many novelties: We present the latest features of the release of the CarMaker product family and much more.
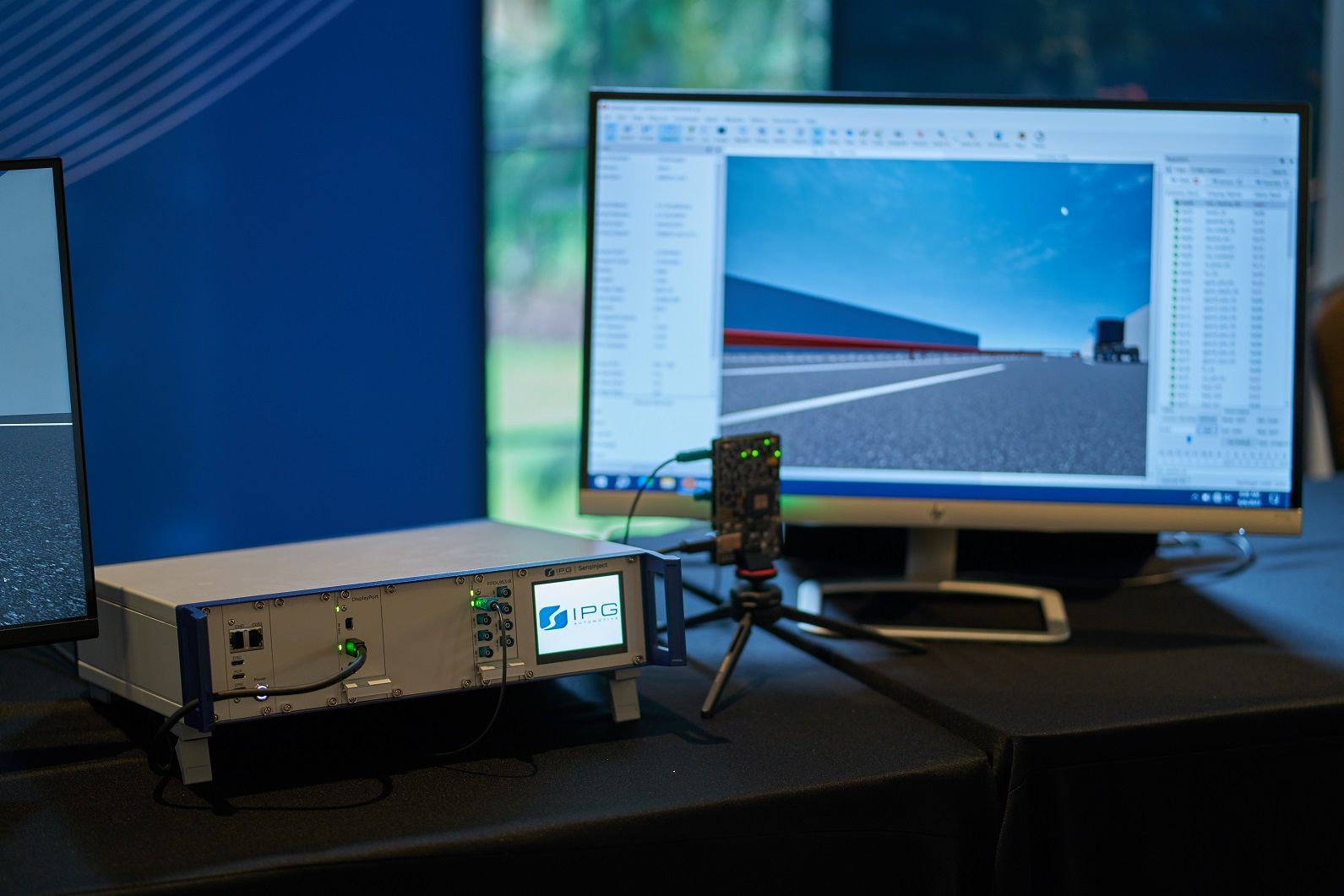
Experience applications live
It’s all in the mix: In addition to interesting presentations, you can experience new products and applications directly during the accompanying trade exhibition.
Networking
Space to exchange ideas: With experts from the automotive and supplier industry or researchers from different areas of expertise present at Open House, you can address your questions directly and make new contacts.
Open House goes international
After the kick-off at Open House Germany on March 12, 2024, the event series tours the world and stops at all our subsidiary locations. Find the dates here and join us!
Open House China: May 22, 2024
Open House France: June 13, 2024
Open House USA: June 18, 2024
Open House Korea: July 9, 2024
Open House Sweden: August 20, 2024
Open House UK: September 24, 2024
Open House Japan: October 31, 2024
If you are interested in participating, contact events(at)ipg-automotive.com.
Insights from past events









































Stay in touch with us and do not miss out on event news!
We will keep you posted! Sign up for our newsletter now and follow us on LinkedIn, XING and Twitter.
Should you have any specific questions, do not hesitate to contact us directly.